Why End-to-End Technology is Becoming the Preferred Choice for Automakers in Intelligent Driving Layouts
 06/09 2025
06/09 2025
 682
682
In the realm of intelligent driving, the advent of end-to-end technology signifies a transformative shift in the architectural design of autonomous driving systems. This shift moves away from the traditional modular approach, where subsystems such as perception, decision-making, planning, and control operate independently, towards an end-to-end system that employs deep learning algorithms to achieve a seamless mapping from input to output. End-to-end technology directly feeds raw sensor data into a single neural network, undergoes multi-layered feature extraction and information fusion within this network, and ultimately outputs control commands for the vehicle. This approach fundamentally breaks the constraints imposed by predefined artificial rules.
The benefits of the end-to-end architecture lie in its seamless data processing, minimal loss during information transmission, and unified optimization of the entire system tailored to the target task. This data-driven deep learning method not only reduces the cost associated with manually designing a plethora of rules but also significantly enhances system iteration efficiency and lowers maintenance costs through the utilization of shared backbone networks.
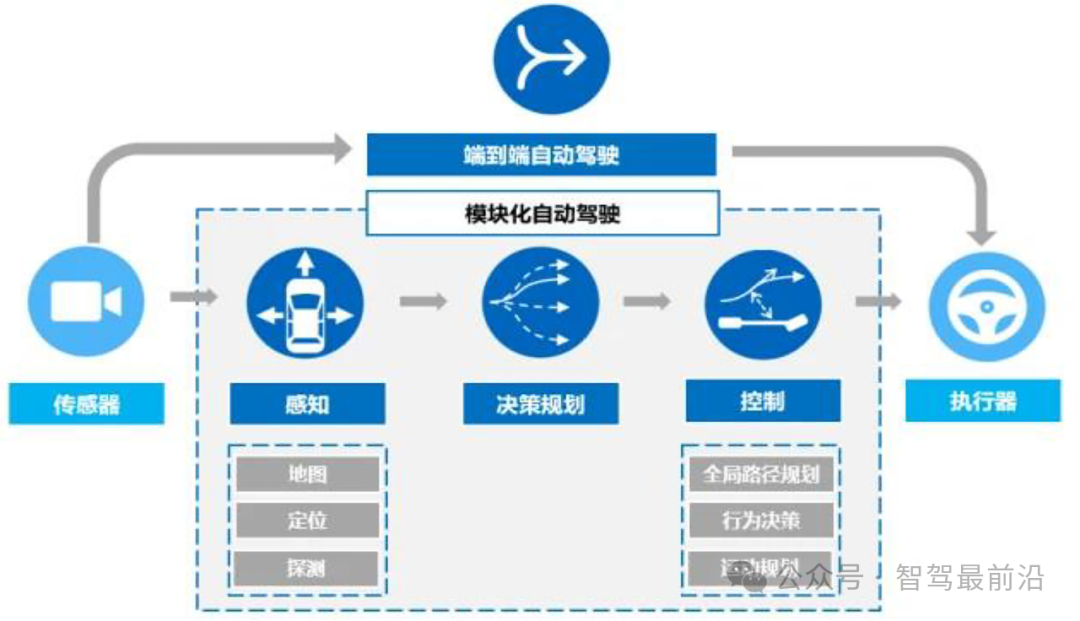
End-to-End vs. Modular Autonomous Driving

Evolution of the End-to-End Technology Path
The journey of end-to-end autonomous driving technology began in 2016, when NVIDIA pioneered the mapping of camera images directly into steering commands through its DAVE-2 system, initiating the exploration of a transition from modular to end-to-end systems. With the increasing sophistication of deep neural network technology and a significant boost in GPU computing power, end-to-end technology has achieved breakthroughs in various aspects, evolving from early behavior cloning to later integration with reinforcement learning. These systems can learn strategies by mimicking expert behavior and further optimize decision-making logic through extensive "trial and error" processes.
To address the challenge of insufficient system generalization, the adaptability of the model to long-tail driving scenarios has been enhanced by aggregating online data and synthetic data that simulates real-world scenarios. This continuous innovation has helped break through technical bottlenecks and safety performance limitations in practical applications.
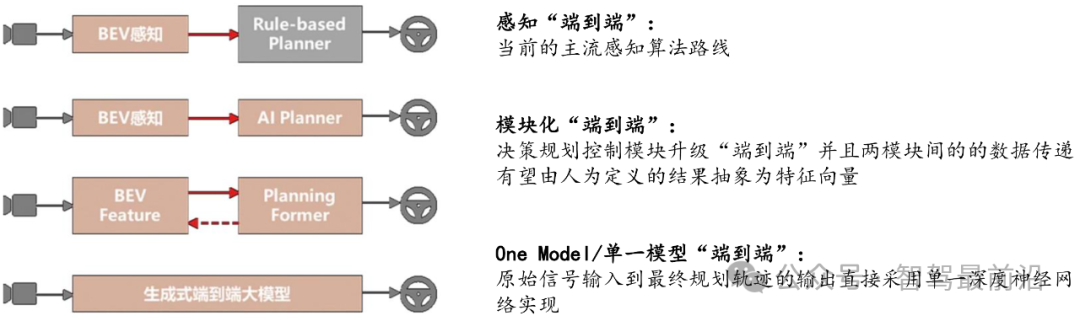
Evolution of End-to-End Technology

Discussion on the Core Technologies and Advantages of End-to-End
The core strength of the end-to-end architecture lies in its data-driven approach, which relies on extensive and high-quality datasets to support model training. This enables autonomous driving systems to attain the capabilities of an "experienced driver." Real-world driving scenarios are complex and diverse, with subtle differences in the driving environment often determining whether the model can accurately infer the corresponding control commands. For instance, during the iteration of its FSD (Full Self-Driving) system, Tesla continuously feeds millions of driving videos into the model, allowing the end-to-end neural network to capture various potential anomalies during driving and significantly enhance data processing efficiency through automatic annotation technology.
This data engine technology not only makes the model more robust in the face of long-tail scenarios but also to some extent compensates for the shortcomings of insufficient real data collection, further bolstering the end-to-end system's ability to handle extreme conditions. The introduction of supercomputing centers and cloud computing resources also provides a solid foundation for training large-scale datasets, propelling the recognition and prediction capabilities of large models for complex road conditions to achieve a qualitative leap.
In the realm of end-to-end autonomous driving technology, different algorithm implementations exhibit unique characteristics, with imitation learning and reinforcement learning representing two distinct research and development pathways. Imitation learning achieves strategy learning by mimicking expert behavior, transforming the driving problem into a supervised learning task and utilizing behavior cloning (BC) to ensure that the model's output closely aligns with expert decisions. While this method is straightforward and efficient, it inevitably encounters issues such as covariate shift and causal confusion in practical applications. To address these challenges, online training methods like DAgger are introduced to further refine the model's ability to handle complex scenarios.
In contrast, reinforcement learning technology acquires driving strategies through continuous "trial and error," with the model constantly adjusting its decision-making strategies based on environmental feedback during ongoing interaction with the traffic environment. Despite theoretically possessing powerful automatic optimization capabilities, reinforcement learning faces practical challenges such as data scarcity, complex scenarios, and lengthy training cycles. Therefore, in actual system design, many solutions opt to integrate reinforcement learning with supervised learning, acquiring basic environmental understanding capabilities through supervisory signals while leveraging reinforcement learning to further enhance the model's long-term decision-making and ability to handle uncertainty. This fusion of both approaches enables the entire end-to-end system to retain the convenience and efficiency of supervised learning while continuously accumulating experience through interaction in complex dynamic scenarios, achieving a higher level of intelligent driving performance.
The iterative advancements in hardware support, data engines, and computing platforms also play a pivotal role in the application of end-to-end autonomous driving systems. Automakers, exemplified by Tesla, continuously iterate on self-developed chips at the hardware level, from the initial HW1.0 to the latest HW4.0, with each upgrade significantly bolstering the vehicle's computing power and collaborating with the self-developed supercomputer Dojo to construct a comprehensive high-performance training and inference platform. This co-evolution of hardware and software ensures that the end-to-end model maintains efficient real-time response capabilities when processing complex scenarios.
Moreover, the continuous progress in cloud data training platforms and computing power support not only provides the necessary resources for training large models but also effectively addresses the issue of limited on-board chip computing power by transferring complex model knowledge from the cloud to lightweight on-board models through cloud distillation technology.

Analysis of End-to-End Technologies Among Automakers
Currently, numerous automakers globally are actively deploying end-to-end autonomous driving technology and making technological breakthroughs focused on core algorithms. Tesla is continuously advancing integrated end-to-end technology based on a pure vision solution, utilizing various sensor data fusion technologies, Transformer networks, occupancy networks, and vast amounts of automatically annotated data to achieve a technological leap from assisted driving to fully autonomous driving.
Huawei, on the other hand, constructs an intelligent driving system based on LiDAR and vision fusion through a modular end-to-end architecture. Leveraging its self-developed HarmonyOS Smart Mobility platform and full-stack AI chips, Huawei achieves deep integration of perception and decision-making planning through the GOD and PDP networks. Huawei's solution not only addresses the challenge of sensor data fusion but also ensures the interpretability and safety of the system through extensive cloud data training, computing power redundancy, and self-developed toolchains, laying the groundwork for future commercialization of L3 autonomous driving.

ADS 3.0 Adopts a Two-Stage End-to-End Architecture
Xpeng Motors has embarked on a technical path based on a pure vision solution and enhanced on-board model performance by relying on cloud distillation models. Xpeng's system significantly improves the recognition accuracy of dynamic targets and static obstacles through its self-developed BEV visual perception large model XNet, supported by large-scale datasets and cloud deep learning architectures. Xpeng Motors utilizes knowledge distillation technology to transfer knowledge between cloud large models and on-board lightweight models, substantially reducing the computational burden on the vehicle side and thus achieving higher-precision driving decisions with limited computing power.
Through continuous iterative optimization, Xpeng has not only improved the accuracy of driving path planning but also significantly enhanced key technical indicators such as illegal parking and emergency avoidance in complex scenarios, successfully achieving a technological breakthrough and market pilot for L2+ autonomous driving.
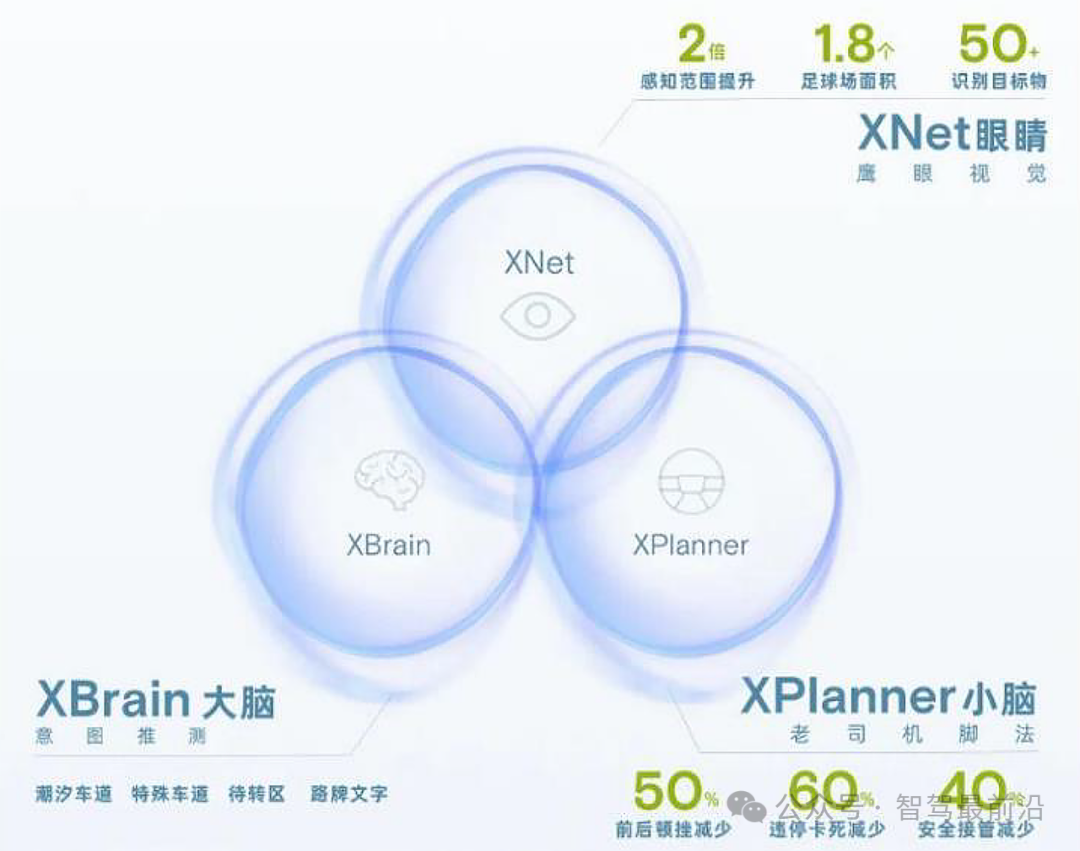
Xpeng XNGP Modular End-to-End Architecture
Li Auto employs a dual-system parallel mode, utilizing a visual language model (VLM) to assist the end-to-end model in normative control. This approach directly maps sensor data into driving trajectories while using the parallel-running VLM system to conduct in-depth analysis and reasoning for complex scenarios. This "fast-slow system" collaborative architecture relies on efficient end-to-end intuitive reactions in most scenarios while invoking VLM for conscious decision-making assistance in extreme or complex scenarios, effectively enhancing system safety and robustness.
Li Auto's innovative approach based on dual-system parallelism retains the efficient real-time characteristics of the end-to-end system while deeply optimizing specific complex scenarios through the logical reasoning capabilities of VLM. This forms a closed-loop intelligent driving decision system that complements each other from perception to planning, and from rapid response to in-depth thinking.
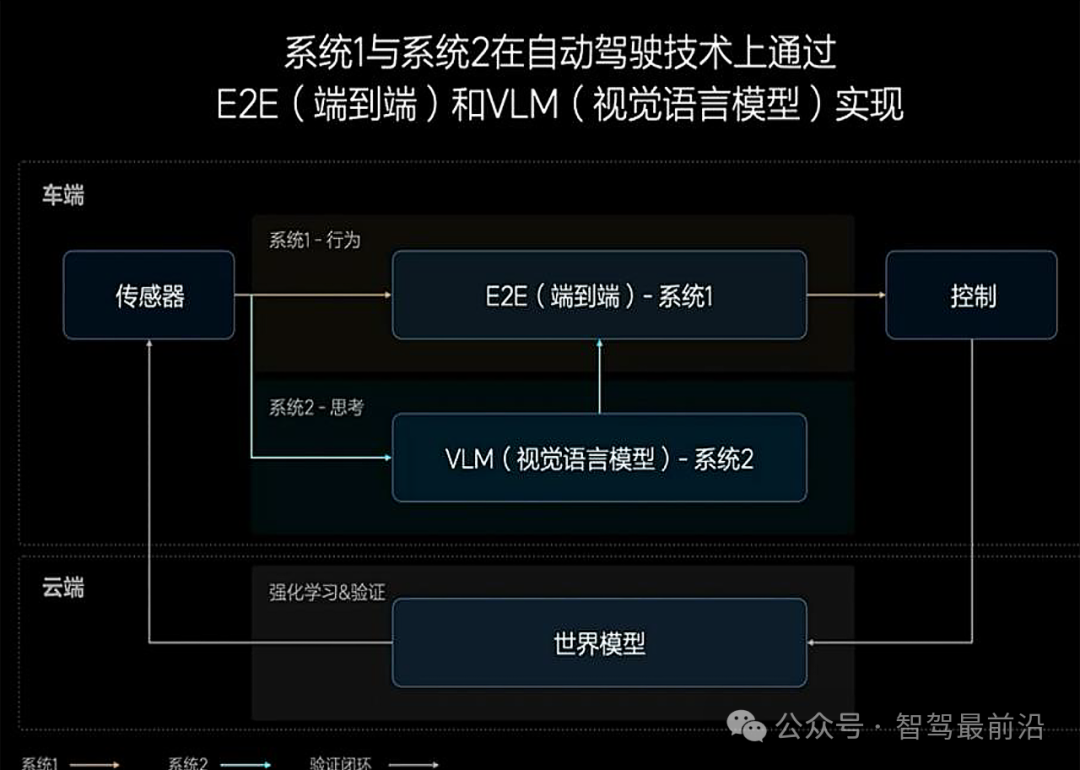
Li Auto Dual-System Architecture

Summary
End-to-end autonomous driving technology stands at a pivotal juncture, transitioning from early experimental stages to large-scale commercialization. With policy support and intensifying market competition, major automakers are leveraging advanced AI large models and knowledge distillation technology to promote the popularization and maturity of end-to-end models in vehicle applications. From the accumulation of high-level autonomous driving test data, the collaboration between vehicle-side and cloud-side technologies, to scene recognition and fusion perception based on deep learning, various technical indicators demonstrate that end-to-end autonomous driving systems are steadily progressing towards higher precision, enhanced robustness, and improved safety.
As major automakers gradually introduce high-level NOA (Navigate on Autopilot) and L2+ autonomous driving systems in models priced at RMB 100,000, intelligent driving technology is extending beyond exclusive configurations for high-end luxury vehicles into the mainstream market, achieving a leap from "intelligent driving equality" to full-scenario commercialization.
-- END --
-
Is the Agent Host a Smart Tax or Actually Awesome?
-
DeepSeek Unveils ‘Expert Mode,’ with V4 Version Slated for Mid-to-Late April Release
-
![]()
BYD’s March Sales Surpass 300,000 Units, Overseas Exports Soar 65.2% Year-on-Year, Setting the Pace in the Global Market
-
![]()
Three Years of Mockery Followed by a Triumphant Return: Meta’s New Model Reemerges as a Champion, Boasting 9 Key Highlights Worth Exploring
-
![]()
5-Minute Charging vs. 99-Second Battery Swapping: What’s Your Pick?
-
![]()
Shrimp Farmers Start Keeping Close Tabs on Costs
-
![]()
Apple’s AI Glasses Unveil Multiple Patents: A Glimpse into a “Modular” Design Future?
-
![]()
AI-Driven Short Dramas Surge in Hongguo: Are Human Actors on the Brink?