Technology Analysis | Revolutionizing Robotics: The Digua Robot RDK S100 Development Platform
 06/24 2025
06/24 2025
 811
811
Produced by Zhineng Zhixin
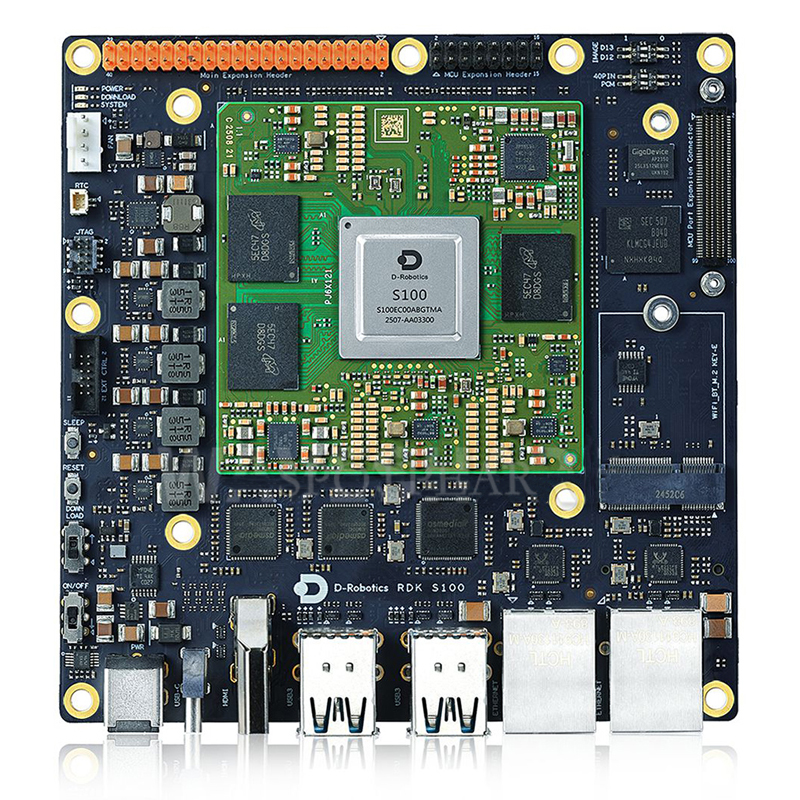
The RDK S100, introduced by Digua Robot, has emerged as a pivotal solution for efficient development and cost-effective prototyping in the robotics industry. It leverages 80 TOPS of BPU computing power, a heterogeneous computing architecture, extensive interface support, and a comprehensive software and hardware development toolchain.
Amidst the surging demand for computational prowess in humanoid and embodied robots, the RDK S100 establishes a scalable development framework for the fragmented robotics market, employing strategies such as the "Big-Small Brain" model, edge-side intelligent inference, and robust ecosystem support.

Part 1
Foundational Heterogeneous Architecture
The "Big-Small Brain" System Design

The RDK S100 development platform's core strength lies in its heterogeneous computing architecture, specifically tailored for robotics applications. It integrates Digua Robot's proprietary BPU, a general-purpose multi-core CPU, and a specialized MCU for real-time control.
With a combined CPU computing power of 100K DMIPS and 80 TOPS for the BPU, the platform offers ample performance reserves for tasks such as local inference, low-latency motion control, and multimodal perception—features highly sought after by mainstream humanoid robots and highly dynamic quadruped robots.

The "Big-Small Brain" structure is effectively harnessed here:
◎ The "Big Brain" (CPU+BPU) primarily handles high-level cognitive tasks, including image recognition, target behavior planning, and path reasoning.
◎ The "Small Brain" is managed by the MCU, focusing on low-latency, real-time operations like motion control, motor drive, and attitude adjustment.
This architecture efficiently distributes computing tasks, enhancing overall system responsiveness and bringing complex model operations closer to the physical execution layer.
The BPU section is deeply optimized based on Horizon's Nash architecture, particularly for CNN and Transformer models, enabling efficient neural network inference. In scenarios involving multimodal inputs for humanoid robots, such as fused vision and audio recognition, and scene semantic understanding, the BPU alleviates high-load inference tasks from the CPU cores, thereby reducing system energy consumption and latency.
Actual measurements reveal that transferring models from the CPU to the BPU can reduce the CPU load by up to 30%, while the BPU itself consumes only 1% of total computing power.
In the third quarter, the S100 will be upgraded to the S100P, with BPU performance boosted to 128 TOPS, the CPU upgraded to 137K DMIPS, and memory capacity expanded to 24 GB. This upgrade anticipates future robot applications requiring higher perception density and more intricate behavior sequences.

The RDK S100's heterogeneous architecture and "Big-Small Brain" model adeptly address the division of labor in robot perception, planning, and control. The proprietary BPU serves as the core of system computing power scheduling, reducing development costs, enhancing local intelligent processing capabilities, and providing a balanced performance-power consumption solution for robot hardware platforms.
Part 2
From Ecosystem to Toolchain: Cultivating the Soil for Robot Development
The RDK S100 is a holistic software and hardware platform encompassing sensor access, algorithm deployment, and system operation. Its interface support covers mainstream sensors, actuators, and high-speed communication protocols, ensuring true "plug and play" capabilities, vital for swiftly completing prototype verification and algorithm deployment in diverse scenarios.
Digua Robot has also introduced a comprehensive SDK, development documentation, sample code, and simulation toolchain. Leveraging cloud environments like Omniverse, it facilitates model training and algorithm validation for developers.
The end-cloud collaboration is further enhanced: post-training in the cloud, models can be swiftly deployed to the edge-side BPU using the official toolchain, significantly reducing migration challenges.

Within its ecosystem, the RDK S100 supports multiple practical applications: collaborative intelligent storage with QiuZhi Technology's robotic arms, voice command execution with Reerman humanoid robots, and complex gait switching with Unitree's Go2 quadruped robots. These demos, developed by three engineers in two months, attest to the platform's efficiency in rapid prototyping and shortened development cycles.
Digua Robot has established a robot algorithm center on a web platform, integrating open-source ecosystems like LeRobot, offering developers ready-to-use perception and planning models. Its cloud platform also supports scenario simulation data generation through large models, addressing data scarcity issues in the robotics industry by creating training sets for specialized environments like lawn mowing and pool cleaning.
Regarding migration costs, Digua's platform offers a seamless adaptation mechanism for motion control algorithms, allowing developers to smoothly transfer control algorithms between platforms by simply defining robot joint parameters. This creates a low-friction path for developers migrating from other ecosystems to Digua.
From hardware expansion, SDK toolchains to cloud training support, the RDK S100 constructs the comprehensive "full-stack soil" necessary for robot development. Based on open interfaces, end-cloud collaboration, and comprehensive toolchains, it provides an efficient and highly adaptable platform for fragmented robotics application scenarios, robustly supporting the development and implementation of embodied intelligence.
Summary
As the robotics industry transitions towards embodied intelligence, the RDK S100's low cost, high computing power, and rapid deployment capabilities are gradually becoming a turning point for robot control systems, shifting from "customization" to "standardization." From computing power architecture to ecosystem toolchains, Digua Robot offers a hardware platform and underpins it with foundational capabilities.
-
![]()
Li Bin Claims, 'Denying the Pure EV Trend is Like Ostrichism.' What's Li Xiang's Take?
-
Lenovo: Liu Jun Turns Left, Yang Yuanqing Turns Right
-
Lenovo: Liu Jun Goes Left, Yang Yuanqing Goes Right
-
![]()
MiniMax Shares Unlock: Cornerstone Shareholders Show Long-Term Optimism, Yet Stock Plummets Nearly 30% in Two Days; Zhipu Also Sees Nearly 20% Drop Today
-
![]()
Single-Day Plunge of 40%: The 'First AGI Stock' Faces More Than Just Share Price Concerns
-
![]()
Ricoh and Fuji Hike Prices on Legacy Edge; Insta360 Poised to Disrupt Mirrorless Camera Market
-
![]()
Ricoh and Fujifilm Raise Prices in Tandem, Relying on Established Reputations; Insta360 Poised to Disrupt Mirrorless Camera Market
-
![]()
Strategic Shift in Photoelectric Sensing: Maxvision Secures Controlling Stake in CAS Optotech