How Do Autonomous Vehicles Plan Trajectories in Left-Turn Scenarios Lacking Guide Lines?
 09/18 2025
09/18 2025
 805
805
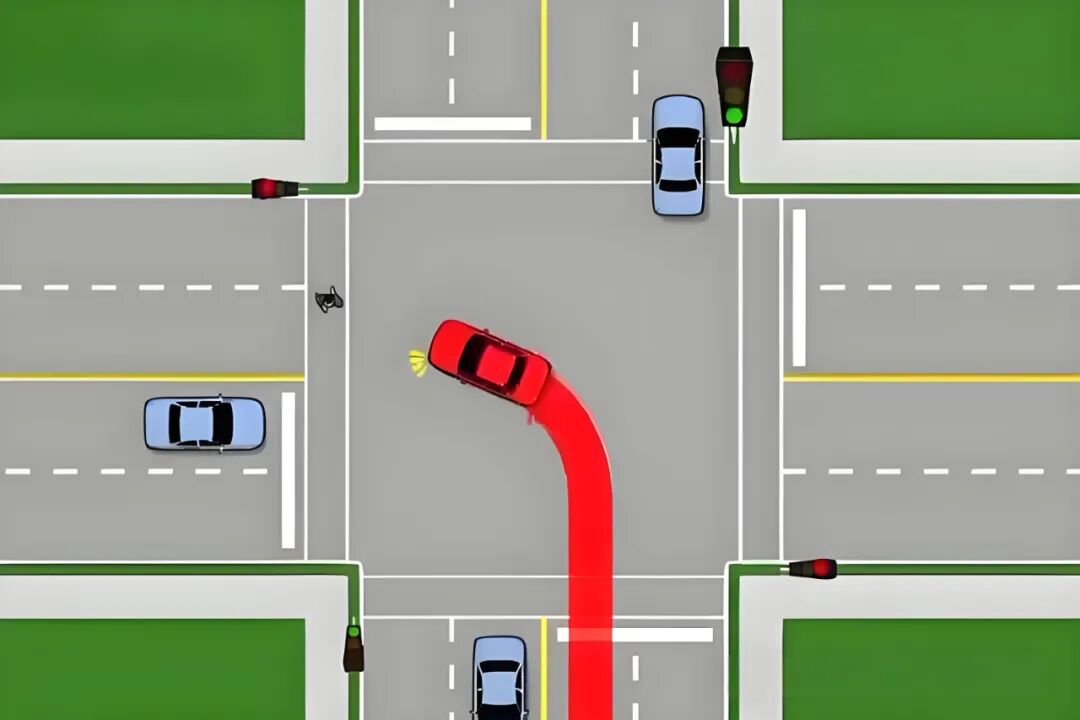
For many novice drivers, executing left turns without guide lines demands careful attention, yet they often manage the maneuver adeptly. However, autonomous vehicles (AVs) typically rely on well-defined reference lines. In the absence of white dashed lines or arrows to mark lane positions, performing left turns without guide lines poses a significant challenge. To meet diverse travel demands, AVs must successfully navigate such scenarios. So, how do autonomous vehicles plan trajectories when turning left without guide lines?
What Technologies Are Essential for Left Turns Without Guide Lines?
First, it's crucial to clarify a fundamental issue: in scenarios without guide lines, trajectory planning transcends simply following the lane center. Lane boundaries, road geometry, and even the intentions of other road users may be ambiguous. The system must make decisions amid uncertainty—determining which path is "legal and reasonable," when to yield priority, when to assertively take gaps, and how to ensure passenger comfort while adhering to dynamic constraints. Achieving these objectives requires coordinated efforts across four levels: reliable environmental perception, accurate behavioral prediction, robust behavioral decision-making (behavioral layer planning), and trajectory generation and control (trajectory/motion layer) that satisfy dynamic and safety constraints.

At the perception layer, autonomous driving systems must achieve high-precision detection and tracking of environmental elements. Cameras identify traffic signs, curbs, sidewalks, and vehicle shapes, while radar provides speed vectors over long distances and in adverse weather. LiDAR (if equipped) distinguishes static obstacles from dynamic targets in 3D point clouds. However, in "no guide line" scenarios, lane boundaries cannot serve as reliable references. Instead, the system uses road edges (curbs, doorways, sidewalk edges) and the movements of other road users as alternative references. High-precision positioning (GNSS+IMU+visual/laser localization) is crucial, but it may drift in urban canyons or tunnels. Sensor fusion must provide a stable reference frame to establish a credible trajectory baseline for subsequent prediction and trajectory planning.
The prediction layer aims to estimate the likely trajectory distributions of other road users over the next few seconds. At unguided intersections, other vehicles exhibit greater behavioral diversity—some slow to yield, others seize small gaps, and some may accelerate aggressively. Prediction models typically output multimodal future trajectory distributions, each with a probability weight. Common techniques include physics-based models using trajectory history, learning models incorporating social forces or interactions, and hybrid models combining maps with intent understanding. It's critical to emphasize that prediction uncertainty is a core input for trajectory planning. The decision layer does not rely solely on the "most likely" trajectory to assess collision risk but robustly handles multiple possibilities to ensure safety margins in probabilistic space.
The behavioral decision-making layer (or strategic layer) addresses the question of "what should I do?"—determining whether to wait, inch forward, or immediately turn. In unguided left turns, the decision-making process often outweighs path details. The decision-maker must integrate legal rules (e.g., right-of-way), local driving culture (e.g., prevalence of aggressive maneuvers), real-time traffic density, opposing vehicle speed and acceleration trends, and the vehicle's performance limits to judge whether to accept a gap. Many systems employ a hybrid rule-based and probabilistic approach, using rules for clear scenarios (e.g., "yield to oncoming traffic") and cost/benefit optimization or game-theoretic models for ambiguous or complex scenarios. Advanced approaches prioritize probabilistic safety margins—selecting actions that avoid collisions under given confidence levels for any predicted outcome.
At the trajectory generation layer, the system converts behavioral decisions into time-parameterized paths (x(t), y(t), θ(t)), ensuring the trajectory satisfies vehicle dynamics and passenger comfort constraints while avoiding predicted dynamic obstacles. Common methods fall into two categories: sampling-based generation and optimization-based solving. Sampling methods generate numerous candidate trajectories within a reference region defined by the behavioral layer (e.g., sampling different curvatures or speed profiles), then evaluate each candidate for collision, dynamic feasibility, and cost before selecting the optimal solution. Optimization methods treat trajectory generation as a constrained optimization problem, minimizing one or more cost terms (e.g., trajectory deviation, acceleration/jerk penalties, safety distance violations) and using numerical solvers to obtain a continuous trajectory. Optimization methods generally produce smoother trajectories with fewer parameters but are more sensitive to initial values and computation time. Sampling methods offer global exploration but require high computational resources and efficient candidate screening strategies.
What Considerations Are Necessary for Left Turns Without Guide Lines?
In unguided left turns, the reference coordinate system for trajectories is critical. Many systems use the Frenet coordinate system for lateral trajectory optimization along an existing reference path. However, when no reference path exists, a "temporary reference line" must first be constructed. This line is typically generated based on road geometry (e.g., a line connecting the centers of both roads or a curve fit) and the desired turning arc (e.g., a circular arc or clothoid curve). When generating the reference line, factors such as turning radius, the vehicle's minimum turning circle, and safety margins for pedestrians, cyclists, and other vehicles must be considered. Subsequently, speed profiles and lateral offsets are optimized in the Frenet coordinates of this reference line and then mapped back to the global coordinate system.

For vehicles, safety is the paramount constraint, often enforced through hard constraints or high penalty terms in trajectory optimization. Hard constraints directly prohibit trajectories that enter collision regions, while high penalty terms heavily penalize trajectories with insufficient clearance from other objects in the objective function. In practical deployment, a common strategy is to first use a conservative "safety envelope" to statically filter out obviously dangerous candidate trajectories, then perform finer-grained optimization within the remaining space. The size of the safety envelope must match prediction uncertainty; when predictions are highly uncertain, the envelope expands, leading to more conservative decisions.
The choice of time horizon is also crucial. Trajectories for lane-keeping or high-speed cruising can be planned over longer windows (e.g., 5–10 seconds), but for immediate, interaction-heavy scenarios like intersection left turns, short-term, high-frequency trajectory updates are more important. A typical approach is hierarchical timing: the behavioral layer decides on a strategy for the next few seconds (wait or enter), while the trajectory layer generates high-resolution trajectories over a shorter window (1–3 seconds) for the controller to follow. Meanwhile, the system continuously corrects predictions online, allowing trajectories to be interrupted or replanned during execution to respond to sudden changes.
When making real-time decisions in unguided left-turn scenarios, a common and intuitive metric is the "acceptable gap" or "time gap." This measures whether the time interval between oncoming or lateral traffic and the ego vehicle is sufficient to complete the left turn safely. Engineers typically convert acceptable gaps into speed and acceleration boundaries: if an oncoming vehicle requires t seconds to reach the intersection and the ego vehicle needs τ seconds to complete the left turn, the system deems the gap acceptable if t – τ > safety margin. The safety margin is not constant; it depends on road conditions, visibility, the ego vehicle's acceleration capability, predictions of opposing vehicle acceleration, and legal requirements. In congested, low-speed scenarios, the allowed time difference is smaller; for high-speed oncoming traffic or poor visibility, the system significantly increases the safety margin.
Human-vehicle interaction and non-verbal communication are also crucial for human drivers in unguided left-turn scenarios. Autonomous vehicles lack human eye contact, gestures, or nods, so they must communicate intent through other means. The most basic approach is standardized signals—turning on the turn signal is the most direct intent expression. When necessary, the vehicle can perform slight forward creeping to indicate its intention to enter, while ensuring it can brake sharply if needed. Some research and applications have introduced external signal lights or visual displays to convey messages like "I yield" or "I will turn" to pedestrians and drivers, but these remain experimental with limited adoption and legal recognition. Thus, conservative and clear signaling strategies, along with timely and predictable deceleration profiles, are currently the most practical "communication" methods.
When discussing model and algorithm details, the limitations of dynamics and tire models cannot be ignored. For passenger vehicles, both the kinematic bicycle model and more detailed dynamic models can ensure trajectory feasibility. Trajectory generation constrains maximum lateral acceleration, maximum longitudinal acceleration, and maximum steering angular velocity to avoid trajectories the vehicle cannot follow. Passenger comfort is also translated into constraints or cost terms, penalizing abrupt changes in acceleration, jerk, and lateral acceleration to ensure smooth turning maneuvers.
In highly uncertain scenarios or when opponent behavior is difficult to predict, probabilistic and robust control methods become essential. Frameworks based on Partially Observable Markov Decision Processes (POMDPs) can yield optimal strategies under incomplete observations and uncertain behaviors, but their computational complexity is often high. In practice, systems use approximations or only apply them at critical moments. Another engineering approach is risk-based optimization, defining a risk function that measures the probability of collision or near-collision during trajectory execution and constraining risk within an acceptable threshold during optimization. This way, decisions consider not only expected costs but also tail risks (low-probability but high-cost events).

Data-driven methods are rapidly evolving, particularly for modeling "human-acceptable behavior." By learning from large volumes of traffic scenario data, autonomous driving systems can acquire implicit rules specific to certain scenarios (e.g., drivers in a particular city are more willing to yield under specific conditions) and generate more "socialized" trajectories. However, the interpretability and verifiability of such models remain challenges. In safety-critical scenarios, purely data-driven approaches typically need to be combined with rule-based or physics-based models to maintain predictability and controllability in extreme cases.
Simulation and validation are the final safeguards for ensuring strategy feasibility. In laboratories, systems are exposed to thousands of unguided left-turn scenarios in large-scale simulation environments, testing performance under various weather conditions, visibility levels, road geometries, and opposing vehicle strategies. Simulations must cover rare but dangerous corner cases, such as a motorcycle suddenly emerging from the roadside or an oncoming vehicle braking sharply. Real-world road testing proceeds gradually, starting from closed venues to low-traffic roads and finally complex urban intersections, progressively reducing safety driver intervention. This stepwise validation is not only a technical requirement but also a compliance and ethical necessity.
Numerous engineering details influence the final performance of autonomous vehicles in unguided left-turn scenarios. Sensor placement and field of view determine visibility of the intersection, while synchronization and timestamps between cameras and LiDAR are critical for multi-sensor fusion. Decision frequency must match controller frequency; too low a frequency causes lag in highly dynamic scenarios, while too high a frequency creates computational bottlenecks. The system must also design fallback strategies for extreme cases, such as immediately entering a conservative mode (e.g., stopping in a safe location or slowly exiting the intersection) and issuing hazard signals when sensor data becomes unreliable or sensors fail suddenly.
Final Remarks
Overall, unprotected left turns without guide lines are not a problem solvable by a single algorithm but a system-level challenge. To achieve both safety and efficiency, end-to-end collaborative design from perception to control is required—perception provides a reliable world model, prediction reveals multimodal futures, decision-making balances rules and risks, and trajectory generation solves for optimality among dynamics, comfort, and safety. Combined with robust engineering implementation, comprehensive simulation validation, and cautious real-world testing progression, autonomous vehicles can navigate this seemingly simple yet highly variable scenario as cautiously and considerately as human drivers.
-- END --
-
Why is There a Shortage of High-Quality Tokens? Three New Signals in AI Infrastructure Development
-
![]()
Why Hasn’t AI-Driven Payment Flourished Despite Tech Giants’ Push?
-
![]()
Intensify Efforts in the High-End Optoelectronic Semiconductor Sector! Aipu Dingchun and Jiangsu Meidong Forge a New Joint Venture
-
![]()
From Endoscopes to Optical Interconnects for AI Computing Power: A Veteran Optical Company's Strategic Shift
-
![]()
Behind the Scenes of Token Factories' Rise as a Capital Market Sensation
-
![]()
What Does MaaS Ultimately Bring to Chinese Cloud Providers? | In-Depth Industry Analysis
-
![]()
China’s Auto Resale Value Report Unveiled: AITO M9 Electric and Hybrid Variants Dominate Rankings
-
![]()
Dialogue with Huang Yangming: On the Eve of the Physical AI Boom, the Value of Data Infrastructure Begins to Materialize