The World Humanoid Robot Games Brought Laughter for Three Days, Yet Highlighted Progress in Embodied Intelligence Technology
 08/18 2025
08/18 2025
 692
692

Key Points:
1. The inaugural three-day World Humanoid Robot Games featured numerous humorous moments, primarily due to the robots' current lack of environmental perception and self-control capabilities.
2. In controlled settings, robots can autonomously complete the full perception-decision-execution loop, and embodied intelligence is transitioning from "single-task" to "multi-task generalization".
3. To endow robots with human-like environmental adaptability and task execution abilities, ongoing advancements are necessary in dynamic balance and posture control, low-latency environmental perception and decision-making systems, energy-efficient endurance technology, multi-task generalization learning, and cost-effective, high-reliability hardware solutions.
Author: Lin Yi
Editor: Key Points
For a full three days, the world's first robot games captivated global audiences.
While carbon-based life forms anticipated a technologically advanced and futuristic spectacle, the silicon-based participants delivered a starkly contrasting, humorous performance.
The most iconic scene was Unitree's robot's "hit-and-run" incident:
Indeed, it knocked over a staff member, paused momentarily, and then continued running as if nothing had happened...
This incident, which breached Asimov's First Law of Robotics (robots must not injure a human being), quickly went viral on foreign social media.
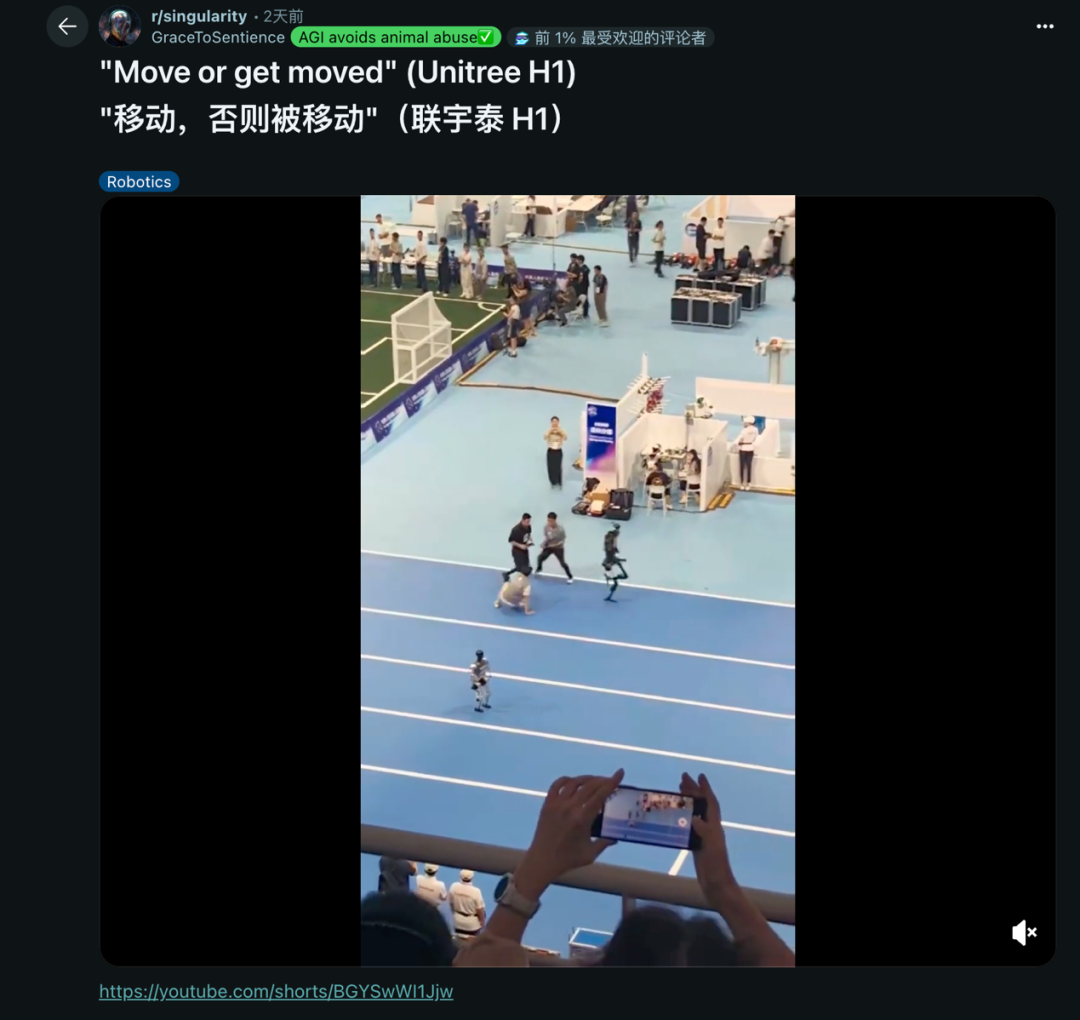
Wang Xingxing later explained that two controllers failed to provide timely instructions during the remote control handover, leading to this comedic turn of events.
However, netizens also debated why remote control was necessary, citing two main reasons.
Firstly, the robot's stability issues stem from dynamic balance. Running is inherently prone to balance loss, requiring robots to adjust their posture swiftly.
Current sensors, algorithms, and actuators lack the necessary reaction speed and accuracy to maintain stability in complex terrains. Manual remote control can intervene when the robot is about to lose balance.
For instance, another Unitree robot, G1, fell during a third-party half marathon in April this year.
Secondly, the robots lack environmental perception ability. While sensors can gather surrounding data, high-speed running often leads to delays or inaccuracies, hindering rapid decision-making. Manual remote control compensates for these perception and decision-making shortcomings.
The robot's collision soon after losing remote control connection indirectly confirms these issues.
Nonetheless, other game events were equally rife with blunders and humor.
In the boxing match, taking advantage of the staff's inattention, the robot circled behind and started punching:

This time, the blame couldn't be shifted to humans. Also in the boxing match, one robot chose to lie down flat, eliciting laughter from the audience:
In the stair-descending task, the robot stumbled and even lost its head:
In summary, bugs and laughter were abundant during these three days.
But do the World Humanoid Robot Games serve solely as a source of amusement? No. Many robots demonstrated impressive performances across various events, potentially representing the current pinnacle of domestic robotics.
01 Unitree H1 Robot: Won the First Gold Medal in the 1500m Track and Field Event
The same Unitree H1 robot that caused the hit-and-run incident also shone, winning the first gold medal in the 1500m track and field event with a total time of 6 minutes and 34 seconds.

From the footage, Unitree H1's running speed was impressive, even lapping other robots:

Unitree H1 also won the 400m championship:

This achievement not only surpassed public perceptions of robots' athletic abilities but also put professional athletes under unprecedented pressure.
Unitree H1's pace equates to a "four-minute mile," approximately 4 minutes and 22 seconds per kilometer.
For reference, the Chinese National Class 2 standard for men's 1500m is 4 minutes and 10 seconds. This means H1's speed surpasses many amateur runners and is close to professional athlete levels.
This achievement is remarkable for its speed and technological progress. Just months ago, robots' marathon performances were unstable, mocked as "grandma's pace." Now, Unitree H1 has transitioned astonishingly from "unsteady" to "almost a blur," a result of hardware and algorithm co-evolution.
Unitree H1's breakthrough performance stems from a solid hardware foundation and revolutionary AI algorithms.
To support high-intensity running, H1 underwent comprehensive hardware optimization:
·High-torque motors: Running requires instant joint power output. H1 features self-developed motors with a peak torque of up to 360 Nm, excellent torque-speed curves, and efficient heat dissipation, ensuring it doesn't downshift or overheat during continuous high-intensity exercise.
·High-strength lightweight structure: Running causes violent ground impacts. H1's body uses lightweight materials like high-strength alloys and carbon fiber, maximizing weight reduction while ensuring structural rigidity, reducing motion energy consumption and joint load.
·High-power battery system: Continuous high-speed running demands high energy supply. H1's high-power battery pack provides stable, long-lasting high-voltage output, sufficient for the motor and control system.
In contrast, other participating robots struggle with basic balance control, often "falling down stairs, losing their heads, or running two meters and spinning in place".
If hardware provides H1 with a strong "physique," advanced AI algorithms give it an intelligent "soul".
The robotics industry is shifting from traditional control methods like ZMP to "Learning" technologies like Deep Reinforcement Learning (DRL).
·Deep Reinforcement Learning (DRL): Through millions of virtual "trial and error" training sessions, robots no longer rely on engineers' complex motion rules but autonomously explore and optimize gait, balance, and motion strategies like humans learning to walk and run. The algorithm scores robot behavior based on preset reward functions (e.g., fastest speed, lowest energy consumption, most stable posture) to learn more efficient and stable motion patterns.
·Embodied AI: This learning approach enables H1 to demonstrate "embodied intelligence." Instead of rigidly executing preset instructions, it exhibits "smooth and coherent adaptive balance abilities" while running. It adjusts gait and center of gravity in real-time, maintaining stability amid slight ground undulations or posture changes. This adaptability enhances motion completeness and fluidity, setting it apart in athletic ability.
While admiring H1's "four-minute mile," we must recognize its underlying constraints: energy efficiency, structural strength, and environmental adaptability.
The ultimate goal isn't just surpassing human athlete records but enabling robots to safely, reliably, and efficiently enter the real world, completing diverse tasks in complex environments.
02 Tiangong Robot: Won the 100m Championship
Unitree robots were the highlight, but others also impressed.
Tiangong from the Beijing Humanoid Robot Innovation Center won the 100m championship:

Notably, Tiangong was the only robot to navigate autonomously throughout the event without human remote control.

This is due to breakthroughs in key technologies. Tiangong is powered by the Beijing Humanoid Robot Innovation Center's full-body control autonomous navigation system, enabling autonomous perception, planning, and task execution in complex environments.
Technical highlights include:
1. Embodied World Model System: Integrates a 72B multimodal large model with physical spacetime understanding and reasoning capabilities, along with a world simulator driving the neural network, helping the robot better understand reality and predict environmental changes, akin to its "central brain".
2. Cross-Ontological VLA (Vision-Language-Action) Model: Allows robots to switch freely between scenarios and tasks, invoking multiple skills through a single model, significantly reducing application development time and cost.
3. Full-Body Control Autonomous Navigation System: Provides point-to-point navigation, dynamic obstacle perception, and avoidance, essential for practical robot work.
4. Thousand-Robot Real-Scene Data Collection Plan: Collects large-scale data from real scenarios like factories, logistics, and hotels, fueling algorithm iteration and model optimization.
Tiangong's powerful visual sensing system processes up to 550 trillion operations per second, complemented by a high-precision inertial measurement unit (IMU) and 3D vision sensors.
Compared to traditional 2D vision, 3D vision offers more accurate defect identification and faster detection, beneficial for automated production and environmental perception.
Tiangong also features a six-axis force sensor, capturing forces on wrists, ankles, and other key parts, enabling compliant control and precise operation.
Tiangong's technological advancements demonstrate full autonomous running capabilities and signify humanoid robots' gradual maturity in perception, decision-making, and execution, pushing embodied intelligence from labs to practical applications.
03 Xingdong L7: Set a New Record in High Jump
In high jump, Xingdong L7 from Tsinghua-affiliated Xingdong Jiyuan stole the show. With a height of 95.641cm, it broke records and won by a landslide.

Among humanoid robots' athletic abilities, high jumping is technically challenging, demanding peak robot performance.
For instance, robots require high instantaneous torque output and structural strength to overcome gravity and generate sufficient lift-off power.
Dynamic control involves complex multi-physical field coupling, requiring robots to optimize center of mass trajectory, regulate angular momentum, and precisely control landing posture in milliseconds, posing significant challenges to control algorithms and sensor accuracy.
Standing at 171cm and weighing 65kg, Xingdong L7's core strength stems from its proprietary high-performance joint module. Boasting a peak torque of 400N·m and a peak speed of 25rad/s, this module imparts the robot with explosive power akin to human athletes.
Its 55 integrated quasi-direct-drive "movable joints" operate in harmony, ensuring precise force transmission and high movement flexibility.
Whether it's the instantaneous force required for high jumping, the previously demonstrated 360-degree spinning jump, high-speed running (up to 4m/s), or complex street dance moves, all showcase the exceptional performance and reliability of its hardware design.
While top-tier hardware lays the foundation for L7's physical prowess, its advanced "brain" — end-to-end reinforcement learning capabilities — is the key to its championship success.
With only a few days to prepare, the R&D team relied on their self-developed end-to-end reinforcement learning platform to conduct millions of simulation trainings in a virtual environment. By utilizing human jumping motion data as a reward signal, L7's algorithm model swiftly iterated, autonomously learning the optimal take-off angle and in-air posture coordination strategy.
Behind this rapid learning ability lies Xingdong Era's self-developed end-to-end VLA (Vision-Language-Action) embodied large model, ERA-42. This model not only supports L7's outstanding athletic performance but also demonstrates robust generalization capabilities in complex scenarios such as warehousing and logistics.
Whether it's intelligently sorting stacked and unordered goods or accurately locating and scanning package barcodes, ERA-42 enables L7 to swiftly adapt and efficiently complete tasks.
Xingdong L7's championship victory is a powerful testament to Xingdong Era's full-stack self-research technology roadmap, which integrates "algorithms + hardware." From the self-research of motors, reducers, and drivers across the full hardware chain to the embodied large model integrating visual perception, language understanding, and motion planning, the deep synergy between software and hardware has jointly contributed to L7's peak performance.
04 Zhiyuan Expedition A2: Wins Championship in Group Dance "Spirit of Terracotta Warriors"
In addition to traditional competitions, this sports meet introduced a unique event — group dance competitions.
Robot dancing has gained immense popularity in recent years, and the robot that emerged victorious in this event is Zhiyuan's Expedition A2.

Supporting this performance is the core technology of Zhiyuan Expedition A2 humanoid robot and its accompanying high-performance algorithms. Compared to traditional "mechanical puppets," Expedition A2 achieves a leap from "mechanical movements" to "artistic expression" through its highly biomimetic motion control system, powerful hardware performance, and intelligent algorithms.
To meet the high demands of dance, the Zhiyuan team conducted comprehensive hardware and software optimizations on the robot. Key components such as motors, joints, and drives were redesigned to withstand the impacts of rotational and leaping dance movements. At the algorithmic level, advanced motion planning and simulation technologies were adopted to achieve precise control of motion trajectories, speeds, and forces, enabling the robot to accurately synchronize with the music rhythm, displaying both natural and powerful movements.
More notably, Zhiyuan robots exhibit exceptional group coordination abilities. Through the combination of sensors and algorithms, the robots can perceive the surrounding environment in real-time and fine-tune their movements to avoid stage collisions, achieving synchronized and orderly movements among nine robots.
This ability is crucial not only for the success of dance performances but also provides a reliable reference for practical scenarios such as logistics warehousing and service guidance. The robots' ability to navigate flexibly, avoid obstacles, and coordinate in complex environments showcases Zhiyuan's deep technological accumulation in motion control and perception interaction.
Although the humanoid robot industry still faces challenges such as high costs and insufficient battery life, Zhiyuan has set an example for future large-scale applications through technological innovation.
05 Where is Embodied Intelligence Now?
From the performance at this robot sports meet, it's evident that embodied intelligence is undergoing rapid breakthroughs. While robots still occasionally "lose character" on the field, the overall level has undergone a qualitative leap compared to the past. From a technological and industrial perspective, the current progress can be understood as follows:
In the past, it was often challenging for humanoid robots to even "stand steadily." Today, robots like Unitree H1 can run close to human athlete's performance in a 1500-meter race. This reflects the co-evolution of high-power motors, lightweight structures, and reinforcement learning algorithms. The robot's ability to maintain dynamic balance during high-speed movement signifies that motion control has entered a practical stage.
Tiangong robots have achieved fully autonomous navigation on the field, which was nearly unimaginable a few years ago. This relies on the integration of a multi-modal perception system, whole-body control navigation, and an embodied world model. While there's still a gap compared to truly human-like environmental understanding, robots can now autonomously complete the entire perception-decision-execution loop in controlled environments.
Xingdong L7's high jump performance showcases the potential of end-to-end reinforcement learning in complex movements. Through millions of simulations in a virtual environment, the robot can quickly master difficult movements. Combined with the Vision-Language-Action (VLA) large model, the robot can not only complete motion tasks but also adapt to diverse real-world scenarios such as logistics and warehousing. This indicates that embodied intelligence is transitioning from "single-task" to "multi-task generalization."
Current robots still face challenges such as high energy consumption, insufficient reliability, and the ability to adapt to complex unstructured environments. However, from a technological roadmap perspective, the integration of software and hardware self-research, multi-modal large model driving, and large-scale real-world data collection are accelerating the industrialization of robots. Whether in factories, logistics, or the service industry, the window for embodied intelligence applications is widening.
While robots are beginning to approach or even surpass ordinary humans in terms of speed and explosive power, they still lag far behind humans in terms of flexibility, stability, environmental understanding, and energy efficiency. This means that the future direction of development is not just to "run faster and jump higher" but also to be "safer, more energy-efficient, and smarter," truly realizing human-robot collaboration.
Overall, embodied intelligence is at a critical juncture, transitioning from "flashy techniques to practical applications." Robots are already capable of demonstrating near-human athletic abilities in specific scenarios, but there's still a long technological and application journey before they can truly integrate into daily life on a large scale.
Some may interpret the rapid iteration of humanoid robots as a "technological bubble," believing that the current excitement is merely a short-term frenzy fueled by capital and traffic. However, judging from the details of this robot sports meet, this assessment is clearly biased.
Behind Unitree, Tiangong, Xingdong, and Zhiyuan lie substantial breakthroughs in technologies such as high-power motors, deep reinforcement learning, and multi-modal perception, rather than just "flashy techniques." These advancements are propelling the "realization of humanoid robots" from science fiction to a tangible industrial blueprint, so they are definitely not a bubble.
However, it's undeniable that for robots to truly possess environmental adaptability and task execution capabilities comparable to humans, continuous efforts are still needed in dynamic balance and posture control technology, low-latency environmental perception and decision-making systems, high-energy-efficiency endurance technology, multi-task generalization learning capabilities, and low-cost, high-reliability hardware solutions.
-
![]()
Anthropic Engages with Samsung for Self-Developed AI Chips, Trend of Large Model Companies Collectively 'Building Chips' Emerges
-
![]()
Why Has Continental Evolved into a Pure Tire Company Post-'Downsizing'?
-
![]()
Zhipu’s Valuation Soars, MiniMax Faces Challenges
-
![]()
Weekly Stock Review | Who Dominates the Market: Hedge Funds, Quant Traders, Institutions, or Hot Money?
-
![]()
Sales Slump Again: Why Are Affluent Buyers No Longer Exclusively Opting for Porsche?
-
![]()
Xiaomi’s New Auto Brand Launch Sparks Stock Rebound: Is a Trend Reversal on the Horizon?
-
![]()
Seres Mid-Year Report Catastrophe: Projected Losses Surpass 1.5 Billion Yuan!
-
![]()
"Fruit Chain Brother No.1" Plummets Below Issue Price on Debut Trading Day! Chaoshan's Wealthiest Woman Stakes HK$24 Billion on AI