What Are the Technical and Risk Differences Between Low-Speed Functional Vehicles and Passenger Vehicles in L4 Autonomous Driving?
 09/05 2025
09/05 2025
 735
735
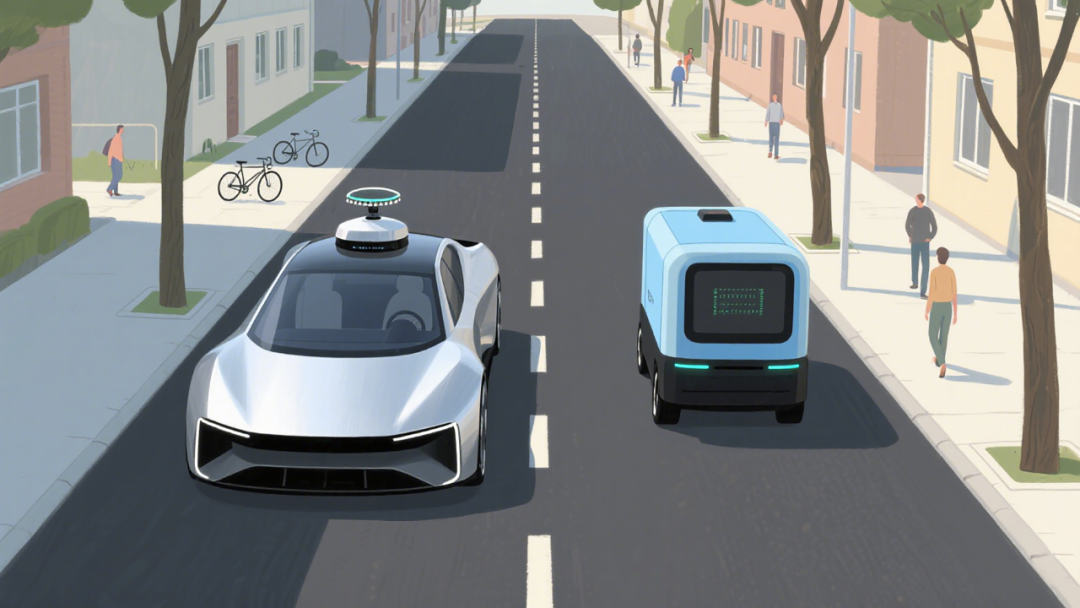
Recently, a reader left a message asking Zhijia Zuiqianyan to analyze the differences in technical difficulty and road risks between low-speed functional vehicles and passenger vehicles when achieving Level 4 (L4) autonomous driving. In fact, even at L4, the requirements for these two types of vehicles are vastly different. Low-speed functional vehicles are designed for specific scenarios and limited speeds, such as park shuttles, community transport vehicles, and delivery bots—commonly referred to as low-speed intelligent driving systems. Passenger vehicles, on the other hand, include family cars and ride-hailing vehicles operating on public roads, with higher speeds and more complex driving environments.
Perception and Localization: Sensor Quantity, Range, and Redundancy
The advantage of low-speed functional vehicles lies in their slow speed and high predictability of surrounding objects. This directly influences perception system design. The slower the vehicle, the less "long-range" capability it needs. Instead, it must clearly detect nearby objects and brake in time. A physical comparison makes this clearer: assuming a typical braking friction coefficient of 0.7 on a dry road and a machine reaction time of about 0.5 seconds (far shorter than human reaction time), a vehicle traveling at 50 km/h requires approximately 21 meters to stop. At 15 km/h, the stopping distance drops to just 3.35 meters. This significant difference means low-speed vehicles demand far less long-range perception and instead prioritize short-range, high-precision sensing.

As a result, low-speed vehicles can optimize sensor selection for cost-efficiency. For example, low-resolution solid-state lidar, narrow-field millimeter-wave radar, or high-quality camera arrays often suffice. The perception frame rate can also be slightly lower since slow speeds reduce scene change rates. However, it is crucial to note: low-speed does not mean simple. These vehicles frequently operate in densely populated, complex environments (campuses, communities, narrow streets) where pedestrians, children, pets, and small vehicles may appear unpredictably. Thus, short-range, high-precision recognition and robust classification/behavior prediction remain essential.
In contrast, passenger vehicles aiming for L4 face complex open-road scenarios, including urban arterials, highway ramps, and fast-moving intersections. Perception requirements here are twofold. First, the system needs longer-range sensing and stable tracking to plan lane changes, overtakes, and other maneuvers. Second, sensor redundancy and heterogeneous sensor fusion (camera + radar + lidar) are critical. At high speeds, the window between obstacle detection and decision-making is extremely short. Any sensor blind spots or failures could lead to catastrophic outcomes. Thus, passenger vehicles typically integrate more comprehensive sensors and employ complex data fusion algorithms.
Regarding localization, low-speed vehicles can simplify the problem by operating in predefined areas. High-precision maps combined with base station calibration, visual localization (using landmarks), or simplified RTK systems often suffice. Passenger vehicles, however, require more robust fusion solutions to handle GPS occlusion, multipath interference, and environmental changes, with stricter demands on mapping accuracy and real-time updates.
In summary, for perception and localization, low-speed vehicles focus on short-range accuracy, cost-effective reliability, and behavior prediction in crowded areas. Passenger vehicles must address long-range sensing, sensor redundancy, complex data fusion, and wide-area mapping/localization challenges.
Decision-Making and Control: Speed, Redundancy, Fault Tolerance, and Minimum Risk Conditions
From a decision-making standpoint, speed dictates the available time window. Low-speed vehicles have more time to collect data, optimize trajectories, and even consult cloud-based systems or remote operation centers. This makes computationally intensive algorithms more feasible in low-speed scenarios. In terms of control, the dynamic model is simpler, and lateral control accuracy (e.g., steering speed and roll) is less critical. However, longitudinal control (smooth starts/stops, avoiding jerks) is harder to tune because passengers in low-speed vehicles are less tolerant of abrupt movements, and frequent stops demand high mechanical reliability.
Passenger vehicles face the dual challenge of making correct decisions and executing them safely under extreme time constraints. High-speed lane changes, emergency maneuvers, strategies for coexisting with human drivers, and interpreting complex traffic rules (e.g., handling yellow lights or temporary lane occupations) require the system not only to "know" the right strategy but also to ensure it does not worsen outcomes in extreme cases. Thus, passenger vehicles typically employ higher levels of execution redundancy, such as dual-channel brake control, independent brake chains, separate power supplies, and hot-backed-up computing platforms. The goal is to ensure that if one path fails, the other can safely guide the vehicle to a minimum risk condition (e.g., decelerating to a stop or moving to a safe lane).

The requirements for achieving "minimum risk conditions" also differ. For low-speed vehicles, this usually means stopping on the spot or slowly moving to a less populated area—relatively straightforward in controlled environments. For passenger vehicles, especially on highways, it often involves complex lateral control (e.g., guiding the vehicle to the emergency lane) or coordinating with traffic control centers, demanding higher real-time performance from sensors and control systems.
Consequently, software verification efforts vary significantly. Low-speed vehicles operate in narrower Operational Design Domains (ODDs), allowing concentrated test scenarios that can be replicated in real venues, making it easier to achieve verification coverage. Passenger vehicles have broader ODDs, with exponentially growing scenario spaces. They must rely on extensive simulation, big data-driven scenario coverage, road testing, and long-term operational data to fill gaps. This results in much higher software development, testing, and verification costs for passenger vehicles compared to low-speed functional vehicles.
Regulations, Operations, and Road Risks: Liability, Insurance, and Social Acceptance
Deploying vehicles on public roads involves not just technical challenges but also legal and operational considerations. Low-speed functional vehicles, often used in closed or semi-closed scenarios, can be prioritized for implementation. Regulatory approval is relatively easier to obtain through exemptions or advance permits, as their speed, travel distance, and interaction objects are well-defined. Operators can manage risks via geo-fencing, time restrictions, remote monitoring, and manual takeover links, enabling quick recovery in case of issues. In terms of insurance and liability, low-speed vehicles are typically seen as "low-loss" assets, with different premium and claim structures than passenger vehicles. However, liability issues still exist.
Passenger vehicles face more complex and "costly" road risks. Accidents on highways or urban arterials can result in severe consequences, including medical expenses, property damage, and traffic disruptions. Regulatory thresholds for L4 passenger vehicles are higher, requiring stricter compliance with functional safety (ISO 26262), SOTIF (ISO/PAS 21448), cybersecurity, and data protection standards. Operators must also navigate greater public scrutiny and complex legal liabilities, such as the reasonableness of the vehicle’s decision-making in unavoidable collisions, the legality of remote intervention, and compliance with local traffic laws.
Another risk factor is mixed traffic. While low-speed vehicles operate at slow speeds, they are more vulnerable when sharing roads with faster vehicles, facing risks like being cut off, tailgated, or squeezed out at ramps. Passenger vehicles, though more maneuverable in mixed traffic, are more likely to trigger high-speed collisions or chain accidents, necessitating redundant systems and extreme safety strategies.
Additionally, low-speed vehicles are better suited for centralized management (fleet scheduling centers, ground control, real-time monitoring), allowing problems to be resolved via manual intervention or remote control. Passenger vehicles, aiming for wide-area autonomy, must distribute risks and decisions to individual vehicles, requiring scaled-up regulatory and quality assurance systems.
Final Thoughts
When achieving L4 autonomy, low-speed functional vehicles face technical challenges centered on short-range, high-precision perception, complex crowd behavior prediction, cost-effective engineering, and reliable operational systems for closed/semi-closed ODDs. Their road risks are relatively controllable, with lighter accident consequences. However, interaction with faster traffic flows still demands careful design. Passenger vehicles require greater advancements in sensor coverage, redundancy design, real-time decision-making, and large-scale verification. They must also meet higher regulatory standards, navigate complex liability and insurance issues, and gain public trust.
Low-speed vehicles serve as an excellent testing ground for "early implementation and rapid iteration," while passenger vehicles need more time, data, and safety guarantees to make legal and public trust-worthy progress. If you are developing low-speed functional vehicles, prioritize operational safety (geo-fencing, remote assistance, manual takeover links) and crowd behavior prediction, focusing on short-range accuracy and low-speed control. For passenger vehicles, emphasize sensor redundancy, provable avoidance strategies, and large-scale scenario testing systems. Communicate proactively with regulators and insurers about verifiable safety proof paths. Regardless of vehicle type, transparent safety communication and explainable minimum risk strategies are key to social acceptance.
-- END --
-
![]()
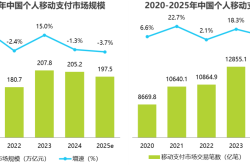
Why Hasn’t AI-Driven Payment Flourished Despite Tech Giants’ Push?
-
![]()
Intensify Efforts in the High-End Optoelectronic Semiconductor Sector! Aipu Dingchun and Jiangsu Meidong Forge a New Joint Venture
-
![]()
From Endoscopes to Optical Interconnects for AI Computing Power: A Veteran Optical Company's Strategic Shift
-
![]()
Behind the Scenes of Token Factories' Rise as a Capital Market Sensation
-
![]()
What Does MaaS Ultimately Bring to Chinese Cloud Providers? | In-Depth Industry Analysis
-
![]()
China’s Auto Resale Value Report Unveiled: AITO M9 Electric and Hybrid Variants Dominate Rankings
-
![]()
Dialogue with Huang Yangming: On the Eve of the Physical AI Boom, the Value of Data Infrastructure Begins to Materialize
-
![]()
The Experience is a Bit Unusual! Logitech G Cloud Review: Great Feel, but Not Ideal for Cloud Gaming