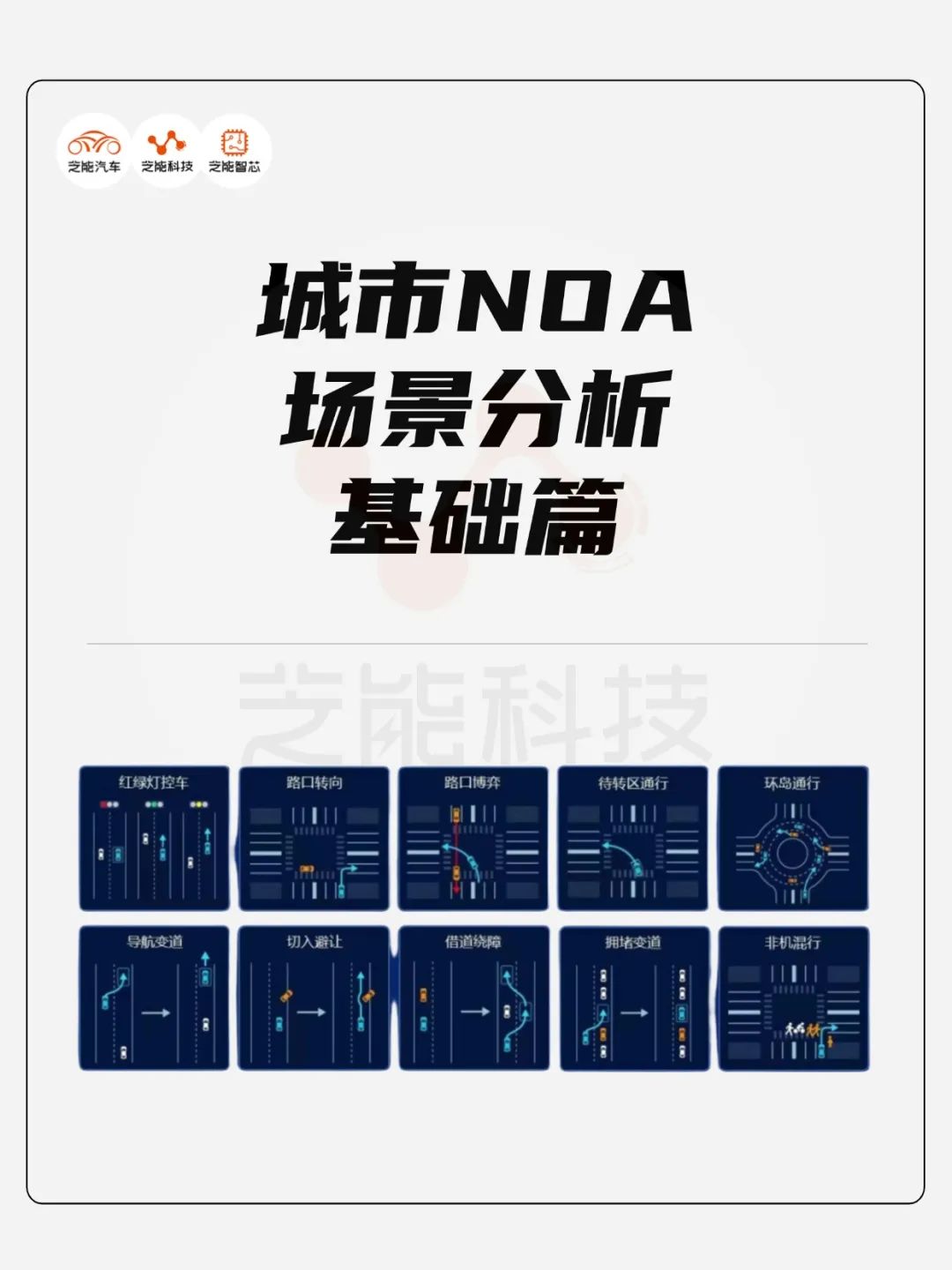
Where are the boundaries of intelligent driving functions in urban NOA?
 04/10 2025
04/10 2025
 764
764
Produced by Zhineng Technology
By 2025, urban NOA and highway NOA have become very popular terms. We need to understand what urban NOA (Navigation on Autopilot) systems can and cannot do.
By integrating navigation systems with autonomous driving functions, it achieves full-journey assisted driving from the starting point to the destination, especially in complex urban road environments. It requires basic speed and lane-keeping functions, as well as handling diverse driving scenarios, including following vehicles, lane changing, intersection navigation, avoiding maneuvering vehicles and vulnerable road users, obstacle avoidance, and various types of U-turns.
Based on the definition of intelligent driving function test scenarios, verification requirements, and performance indicators, we systematically analyze the key functions required by urban NOA systems and explore their safety and stability verification methods under actual urban driving conditions. An in-depth analysis of test scenarios allows us to understand how to evaluate the current state of technological progress.
01
Intelligent Driving Function Test Scenarios:
Diversity and Importance
The core goal of urban NOA systems is to achieve point-to-point autonomous driving without human intervention, requiring vehicles to accurately respond to navigation instructions and safely complete various driving operations in complex urban environments.
To ensure the reliability and safety of the system, the design of functional test scenarios must comprehensively cover actual driving conditions and be verified through clear test definitions and performance indicators.
In addition to basic speed and lane-keeping functions, the following common functional scenarios are particularly critical in urban NOA systems:
● Vehicle Following Function
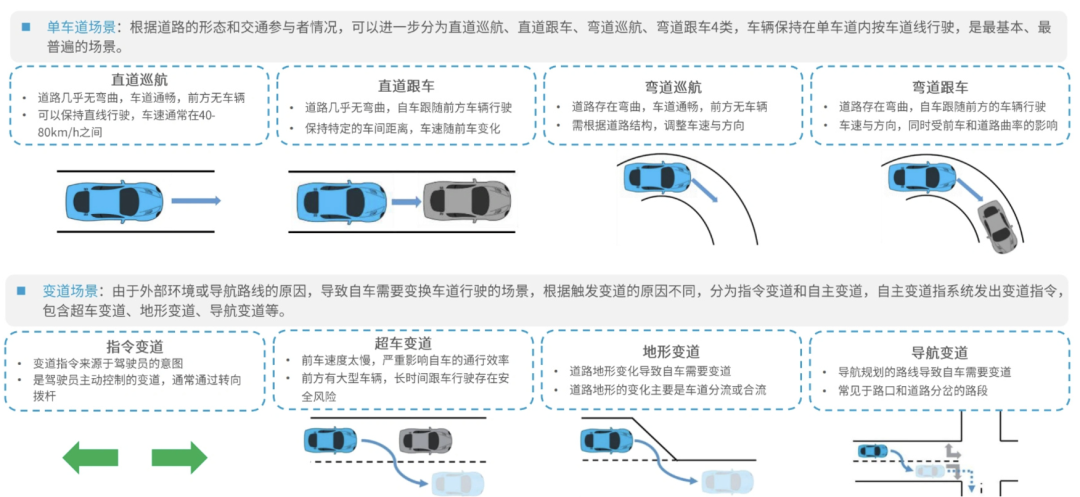
Vehicle following is a common scenario in urban driving, encompassing three sub-scenarios: stable following, following a vehicle with varying speeds, and the target vehicle cutting out.
◎ Stable Following: The test vehicle must maintain a safe following distance when the target vehicle travels at a constant speed of 5-100 km/h. For example, the lateral offset between the ego vehicle and the target vehicle's rear axle must be ≤0.6 m, and the time headway must be ≥0.8 s. This scenario verifies the system's stability in regular following conditions.
◎ Following a Vehicle with Varying Speeds: When the target vehicle decelerates to a stop at 3 m/s² and accelerates to 60 km/h within 3 s at 1.5 m/s², the ego vehicle must smoothly adjust its speed and distance, with a longitudinal distance ≥1 m after stopping and an average acceleration change rate ≤5 m/s³. This test evaluates the system's response ability to dynamic targets.
◎ Target Vehicle Cutting Out: When the target vehicle travels at 20-60 km/h and cuts out of the lane at a lateral speed of 0.51 m/s, the ego vehicle must complete a smooth adjustment within 10 s. This scenario verifies the system's adaptability when the target vehicle suddenly leaves the lane.
● Lane Changing and Merging
Lane changing is a key function of urban NOA systems for navigating path switching, specifically including:
◎ Lane Changing: After the driver triggers the lane-changing command, the ego vehicle must smoothly enter the target lane and resume lane-keeping function, tested once on the left and right to ensure smooth and safe operation.
◎ Merging onto the Main Road: When the ego vehicle merges from a ramp onto the main highway, it must safely complete the merging operation according to navigation instructions to avoid conflicts with other vehicles.
◎ Entering the Ramp: When the ego vehicle exits the highway via a ramp, it must smoothly cut out of the main road to maintain the continuity of the navigation path.
● Intersection and Roundabout Navigation
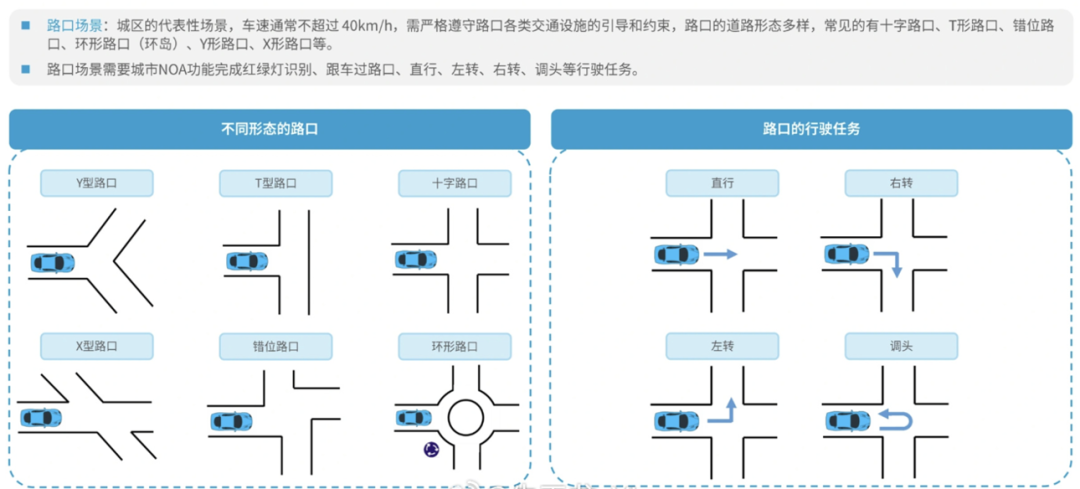
Intersections and roundabouts in urban roads are highly complex scenarios for NOA systems. Test content includes:
◎ Straight Travel at Intersections: The ego vehicle must smoothly cross at least two-lane complex intersections at 40-60 km/h, avoiding errors caused by road misalignment.
◎ Right Turn at Intersections: The ego vehicle must complete a right turn from a non-right-turn lane at 30-60 km/h, verifying the turning ability under navigation guidance.
◎ Left Turn at Intersections: The ego vehicle must safely complete a left turn at 50 km/h when facing a path conflict with vehicles traveling straight at 50 km/h on the right.
◎ Roundabout Navigation: The ego vehicle must travel through the roundabout at 40 km/h and exit from the designated exit, testing its navigation and driving ability in a circular path.
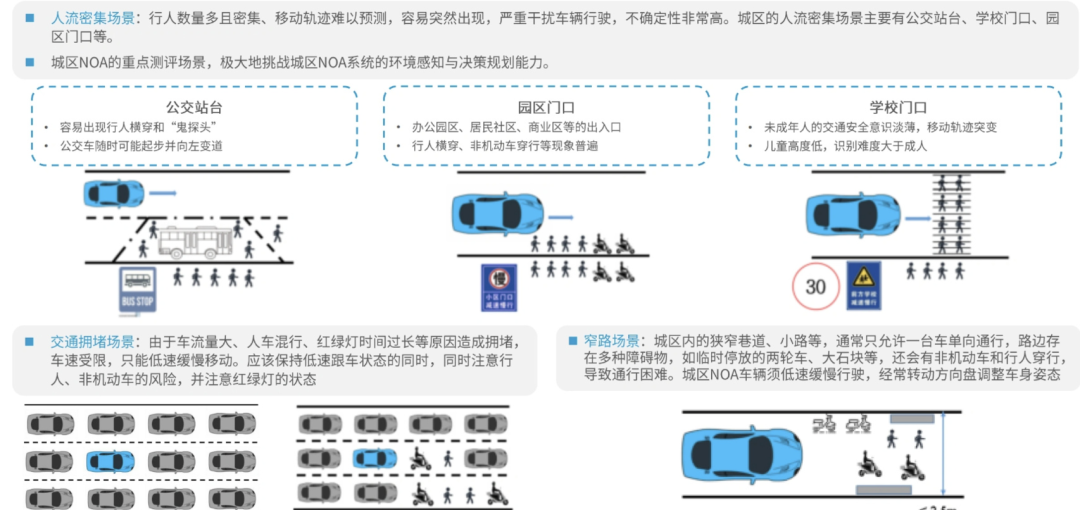
● Vehicle Maneuvering and Vulnerable Road User Avoidance
In urban environments, there is frequent interaction between vehicles and pedestrians/bicycles, and the system must possess the following capabilities:
◎ Vehicle Cutting In: When a vehicle in the adjacent lane cuts in front of the ego vehicle at 1.0-1.1 m/s, the ego vehicle must smoothly adjust its speed and distance to maintain safety.
◎ Vehicle Maneuvering: When the target vehicle changes lanes and cuts out with a Time to Collision (TTC) of 2.8 s with a slower vehicle ahead, the ego vehicle must smoothly adjust to the new following state.
◎ Avoiding Pedestrians/Bicycles: When encountering pedestrians or bicycles ahead in a solid-line lane, the ego vehicle must decelerate and follow, ensuring a safe distance and smoothness.
● Obstacle Avoidance and U-turns
Road obstacles and U-turns are special requirements in urban driving:
◎ Avoiding Cones/Barriers: When driving on a two-lane road at a set speed, the ego vehicle must change lanes to bypass obstacles on the right, with a lateral distance of 1.5 m from the inner edge and a longitudinal distance >100 m.
◎ Intersection U-turn: The ego vehicle must complete a U-turn at 50 km/h under navigation guidance, requiring smooth operation.
◎ Dedicated Fork U-turn: Complete a U-turn at 50 km/h at a dedicated U-turn intersection, ensuring the accuracy of path execution.
● N-shaped U-turn
The N-shaped U-turn is a complex function in urban NOA systems, with the test scenario defined as performing a U-turn at an intersection with two-way two-lane traffic.
After setting the navigation path, the ego vehicle cruises at a stable speed of 50 km/h and completes the U-turn operation, with smoothness as the performance indicator. This scenario verifies the system's navigation execution ability in narrow spaces and multi-directional interactions.
02
Urban NOA System
Verification Requirements and Performance Indicators Analysis for Test Scenarios
To ensure the functional realization of urban NOA systems, test scenarios must be evaluated through strict verification requirements and quantitative performance indicators.
From a technical perspective, we deeply analyze the test design and significance of several key scenarios:
● Dynamic Response Capability of Vehicle Following Function: The testing of the vehicle following function not only focuses on static distance maintenance but also verifies the system's adaptability to dynamic changes.
For example, in the "Following a Vehicle with Varying Speeds" scenario, the process of the target vehicle decelerating to a stop and re-accelerating simulates common congestion and starting conditions in urban roads. The ego vehicle must complete the stop within 3 s and achieve smooth acceleration under the constraint of an acceleration change rate ≤5 m/s³. This indicator directly reflects the system's control precision and passenger comfort.
Additionally, the 10-second adjustment window and ≥0.8 s time headway requirements in the "Target Vehicle Cutting Out" scenario ensure the system's safety redundancy under sudden changes in operating conditions.
● Path Planning Capability for Lane Changing and Merging: Lane changing operations rely on the collaborative work of sensor perception, path planning, and execution control.
Taking "Lane Changing" as an example, the ego vehicle must complete left and right lane changes in combination with the surrounding environment after the driver triggers the command, with the performance indicator being "smooth completion". This vague indicator can be refined into quantitative standards such as lateral acceleration ≤0.3 g and lane-changing time ≤5 s in actual testing.
"Merging onto the Main Road" and "Entering the Ramp" further test the system's real-time response ability to navigation data, requiring safe cut-in or cut-out in complex traffic flow, reflecting the advanced decision-making ability of urban NOA systems.
● Navigation Synergy for Intersection and Roundabout Navigation: The test scenarios for intersections and roundabouts highlight the integration of navigation and autonomous driving functions in NOA systems.
For example, "Left Turn at Intersections" requires the ego vehicle to safely complete the turn when facing oncoming vehicles on conflicting paths, which requires precise traffic signal recognition, path prediction, and avoidance strategies. The performance indicator "safe completion" implies zero collisions and operations that comply with traffic rules.
Similarly, "Roundabout Navigation" tests the system's path selection ability in multi-exit roundabouts. The set speed of 40 km/h and the requirement for "stable travel" further verify its control stability in continuous curvature changes.
● Safety of Vehicle Maneuvering and Vulnerable Road User Avoidance: The presence of vulnerable road users (such as pedestrians and bicycles) in urban roads places higher demands on NOA systems.
In the "Avoiding Pedestrians/Bicycles" scenario, the ego vehicle must decelerate and follow within a solid-line lane, maintaining a longitudinal distance >100 m from the target. This design avoids unnecessary lane-changing risks, reflecting the system's compliance with traffic rules and priority for safety.
In the "Vehicle Cutting In" scenario, the brief window of 0.4-0.6 s time headway tests the system's emergency response ability, ensuring stability even in high-density traffic.
● Execution Precision of Obstacle Avoidance and U-turns: The "Avoiding Cones/Barriers" scenario simulates temporary construction or obstacles in urban roads, requiring the ego vehicle to actively change lanes to bypass objects with a lateral intrusion of 1.5 m after detecting them.
The realization of this function depends on high-precision environmental perception and path planning. The performance indicator "smooth bypass" can be quantified through lateral acceleration and speed fluctuations.
"N-shaped U-turn" and "U-turn" test the system's low-speed maneuverability in narrow spaces. The cruise speed of 50 km/h and the requirement for "smooth completion" ensure the comfort and safety of the operation.
Summary
As an advanced form of intelligent driving technology, the realization of urban NOA system functions depends on the comprehensive verification of diverse test scenarios. From six aspects including vehicle following, lane changing, intersection navigation, vehicle maneuvering and vulnerable road user avoidance, obstacle avoidance, and U-turn functions, the article analyzes common functional scenarios and their test standards.
These scenarios, through clear definitions, verification requirements, and performance indicators, not only cover typical operating conditions in urban roads but also provide a quantitative assessment basis for the system's safety, stability, and comfort.
-
![]()
120,000 Layoffs in Silicon Valley Due to AI
-
![]()
Volkswagen Group to Slash Model Range by Half, Cut 1 Million Units of Production Capacity in China and Europe
-
![]()
World Models 101: Fundamentals, Technical Debates, and Scientific Frontiers
-
Polibeli, Xingyun Technology’s Affiliate, Partners with Amazon AWS to Boost Computing Power in Southeast Asia
-
![]()
Computing Power Infrastructure: Sudden Pause or Strategic Shift?
-
![]()
Zhipu Unveils 'Touch High' Initiative: Prioritizing Long-Term AGI Advancement Over Immediate Monetization
-
![]()
July "MIIT Auto Show" Unveils Major News: BYD Shark Pickup Makes Debut, Xiaomi Pengcheng Releases Official Images
-
![]()
Who is the Imaging King Among 26-Year-Olds? A Head-to-Head Comparison of MiOV's Top Three Ultra Flagships: The Results Will Astound You