The Evolution of Horizon Robotics' Urban NOA Design: Achieving True User-Friendliness
 08/28 2025
08/28 2025
 796
796
Produced by Zhineng Technology
The intelligent driving industry underwent significant fluctuations in 2025, with many consumers initially perceiving assisted driving as functional but somewhat "rigid." Lane changes were abrupt, braking in complex road conditions was tense, and the urban driving experience lagged behind that of highways.
Historically, technological advancements relied heavily on functional overlays and rule patches, which have proven insufficient in handling complex urban traffic. True improvement necessitates streamlining the system, unifying logic, and making controls more natural and secure.
At the Horizon HSD Experience Conference, numerous design philosophies were shared, which we have compiled for your reference.
01 The Evolution of Urban NOA: From Rules to Models
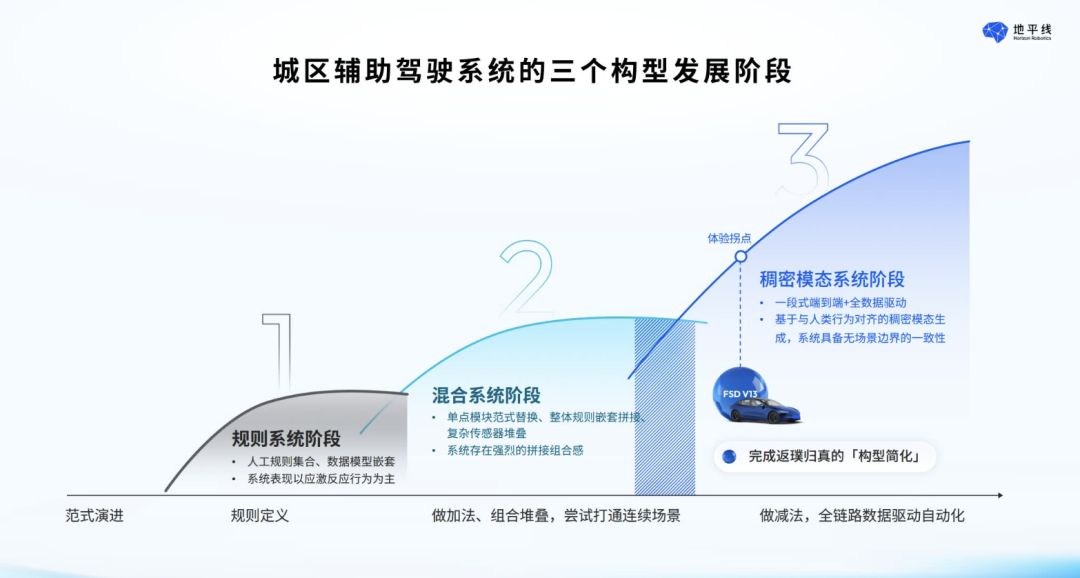
Intelligent driving technology has evolved through three distinct phases: from early rule-based systems, to combined solutions leveraging perception results + rule patches, and now to end-to-end models.
● Phase 1: Rule-Driven Systems
Initial mass-produced solutions integrated some AI perception, but their core still relied on manually set rules. After identifying targets, the vehicle would make decisions through preset logic. However, this approach required enumerating various scenarios, leading to high maintenance costs, low scalability, and an inability to adapt to complex real-world traffic environments.
The issues with this approach are evident:
- Rules require constant updates, resulting in high maintenance costs.
- The system responds rigidly in complex traffic and fails to adapt to changing scenarios.
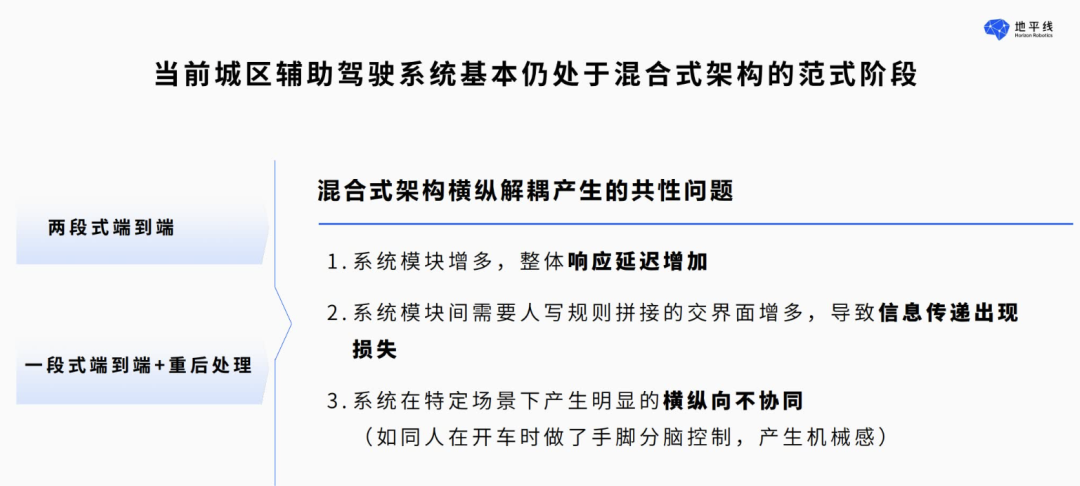
● Phase 2: Hybrid Systems
Also known as functional patching or an "additive approach," this phase emerged after the limitations of rule-based systems became apparent. The industry introduced concepts such as multi-sensor fusion, multi-scenario coverage, and even the addition of LiDAR.
However, these improvements did not alter the fundamental architecture, and the system remained fragmented, leading to inconsistent experiences. Highways, urban areas, and parking were handled separately, with control logic layered on top of each other, resulting in disconnected lateral and longitudinal actions and a "rigid" user perception.
A common manifestation is that the steering wheel moves first during lane changes, followed by longitudinal acceleration, creating an overall lack of coordination. This "patchwork" feel compromises comfort and safety redundancy.
● Phase 3: Dense Modal Systems
The introduction of Tesla FSD V13 marked a true turning point. The integrated processing approach based on large-scale models aims to reduce intermediate splits and handle perception, planning, and control holistically, directly outputting trajectories through a unified model.
This brings about two significant changes:
- The system architecture is simplified, and iterations depend on data and computing power rather than rules.
- Control performance is smoother, with lateral and longitudinal actions coordinated, eliminating the "steer first, accelerate later" phenomenon.
This has been the most notable technical trend in the industry over the past year.
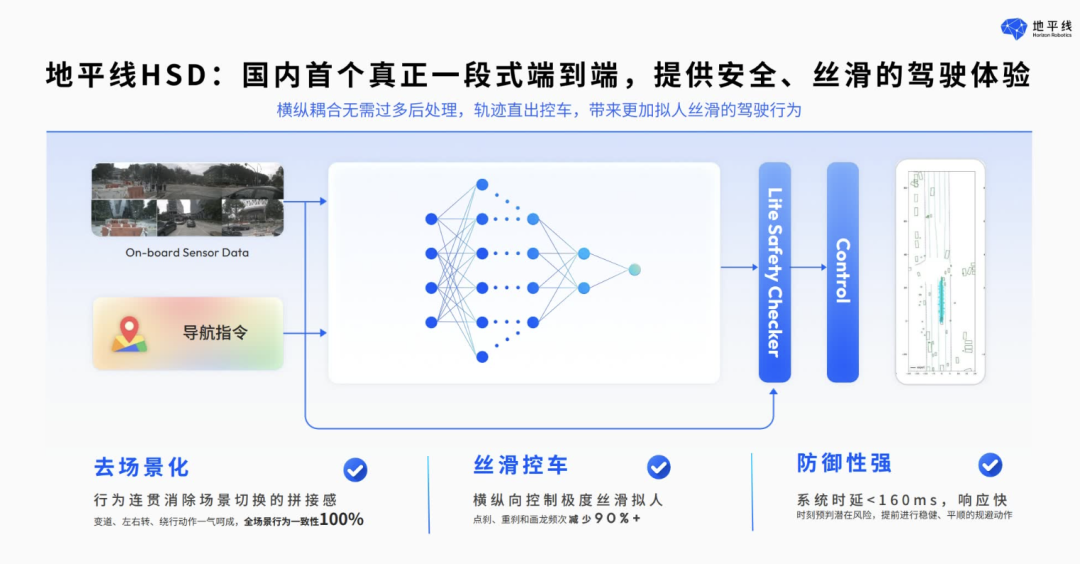
The HSD system launched by Horizon Robotics on the Journey 6P platform adheres to a core design philosophy of "reducing complexity and improving consistency," emphasizing three key features: minimalist architecture, joint model output, and defensive driving capabilities.
● Unified Architecture, Reducing Fragmentation
HSD does not differentiate between scenarios or rely on numerous rules, but rather handles different road conditions through a unified model. The input is an image, and the output is a trajectory, with only basic safety constraints (such as collision avoidance) retained in between.
The benefits of this approach are:
- Users do not perceive mode switching, and performance remains consistent on highways and in urban areas.
- Latency is lower, with Horizon's internal testing showing that the core link is controlled within 150ms, approaching human reaction times.
● Joint Control, Reducing "Abrupt" Actions
In traditional systems, lateral (steering) and longitudinal (speed) control were handled separately, leading to "steer first, move later" scenarios or sudden deceleration during lane changes. HSD directly outputs the overall trajectory, making lane changes and deceleration a continuous action with fewer harsh brakes, resulting in a smoother overall experience.
For example, when navigating narrow roads or construction zones, the vehicle will smoothly decelerate in advance rather than abruptly stopping.
● Anticipating Rather Than Reacting
HSD focuses on "reducing risks in advance" to address the issue of "hard braking" in extreme scenarios by intervening before risks materialize.
Through long-term input, the model can identify potential conflicts and initiate speed reduction early. For instance, when encountering blind spots or non-motorized vehicles crossing, the vehicle will smoothly decelerate before approaching. This defensive driving capability and predictive ability stem from the model's holistic understanding of the scenario, marking a significant departure from older systems reliant on rule stacking.

The design logic of HSD involves continuously optimizing the model through extensive real-world scenario data and reinforcement learning. With increasing data scale and computing power, the system has demonstrated "predictive" capabilities surpassing humans in some complex scenarios. For example, in congested and passing conditions, the vehicle will adjust its strategy in advance to avoid risks.

From an industry perspective, the adoption of the end-to-end approach signifies a commitment to "doing less" to make the system simpler, more stable, and more trusted by users. Functional stacking does not genuinely enhance the user experience.
To transform intelligent driving from "functional" to "user-friendly," three conditions must be met:
- The system architecture must be simple, facilitating iteration and reducing the risk of failure.
- Lateral and longitudinal control must be natural, reducing user mistrust.
- Large-scale deployment on mass-produced vehicles with continuous experience improvement.
Summary
Horizon Robotics' exploration of urban NOA represents an upgrade from "decentralized architecture to integrated paradigm." By eliminating information loss between perception and control through "one-stage end-to-end" processing, reconstructing control coherence with a combined lateral and longitudinal model, and leveraging low-latency hardware and defensive driving algorithms, the "decision-making intuition" of AI is transformed into a "psychological sense of security" perceivable by users.
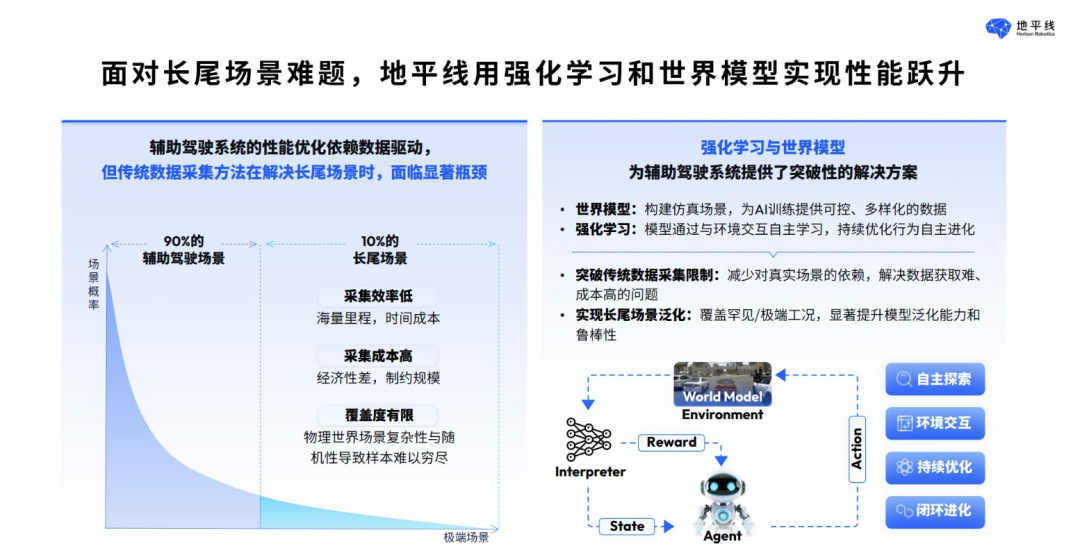
With the continued release of computing power from the Journey 6P chip, the deep integration of the VLM large model and the end-to-end system, and the advancement of a standardized sensor ecosystem, Horizon Robotics will continue to make breakthroughs in technical challenges such as "long-tail scenario understanding" (e.g., distinguishing between stopped cars and queuing cars, navigating complex intersections) and "full-time risk prediction" (e.g., long-term behavior reasoning on unstructured roads).
-
![]()
The Surprisingly Significant Impact Difference Between Quiet and Noisy Cars!
-
![]()
Breaking Through Storage Cycle Barriers: How AI Large Models and Coding Technology Synergize to Drive Transformation in the Security Industry
-
Facilitating the Slimming of Camera Modules! O-film Obtains Utility Model Patent for Periscope-Type Reflective Component
-
![]()
Hikvision Raytine’s Millimeter-Wave Body Imaging Security Inspection Device Achieves ECAC SSc Category A Standard Level 2.1 Certification for European Civil Aviation
-
![]()
Global Market Share for Security Windows Hits 26%! This Optical 'Little Giant' Makes Its Debut on NEEQ
-
![]()
The Evolutionary Path of Agent Engineering: From Prompt to Harness by Zhang Yutao, Co-founder of Moonshot AI
-
![]()
Profits and stock prices are both declining, so why are executives from these auto companies increasing their purchases?
-
![]()
Burning Tens of Billions of Dollars, Yet No Unified Definition for World Models