Why LiDAR is Indispensable for Urban NOA
 05/29 2025
05/29 2025
 1164
1164
As automakers intensify competition in the realm of intelligent driving, vehicles are integrating an ever-growing array of new technologies. Urban NOA (Navigation on Autopilot in urban areas), a common scenario demonstrating intelligent driving applications, has emerged as a focal point of automakers' technological pursuits. As various automakers announce their urban NOA solutions, a clear trend emerges: LiDAR assistance seems to be essential for urban NOA. Despite the ongoing advocacy of a "pure perception" technical route, LiDAR has undeniably proven its value. For instance, BYD's Celestial Eye Intelligent Driving System equips both Celestial Eye A and Celestial Eye B with LiDAR, with the more advanced Celestial Eye A featuring three LiDARs, enabling nationwide mapless navigation and four-way parking functions. So, why is LiDAR indispensable for urban NOA?

LiDAR-based Autonomous Driving Solutions
LiDAR operates by emitting and receiving laser beams, precisely calculating the distance to objects by measuring the time or phase difference required for a laser pulse to travel from emission to reflection off a target and back. Leveraging the speed of light in air and the coordination between lasers and receivers, LiDAR generates vast amounts of 3D point cloud data, constructing a high-precision 3D environmental model. Unlike traditional cameras, LiDAR can output distance and angle information of objects directly, performing more stably under low-light, high-light, and adverse weather conditions, significantly reducing reliance on complex image processing and deep learning algorithms. These advantages make LiDAR a core sensor in autonomous driving systems, providing robust technical support for precise positioning and efficient path planning in complex road environments.
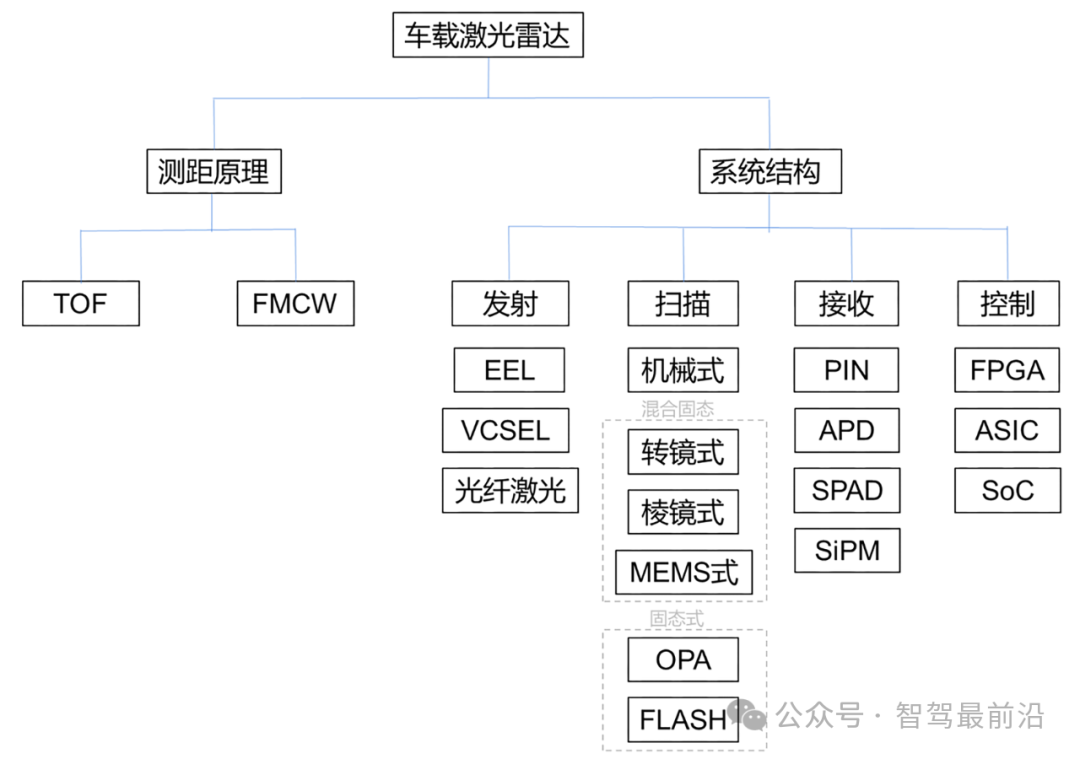
In practical applications, LiDAR can be classified based on scanning methods, beam quantity, ranging principles, and product structure. Traditional mechanical LiDAR rotates the entire emission and reception system to construct an environmental model through 360-degree scanning. While offering long ranging distance and maturity, its complex internal structure, limited mechanical component lifespan, and high assembly and debugging requirements lead to high costs and difficulties in large-scale mass production.
To address these issues, hybrid solid-state LiDAR emerged, utilizing micro-motion devices to replace traditional mechanical scanning. Methods such as MEMS mirrors, rotating mirrors, and prisms are employed to achieve laser beam scanning. MEMS mirror technology is notable for its small size and low cost but often requires multiple devices due to limited mirror rotation angles. Rotating mirror technology, on the other hand, has become the mainstream choice due to its good stability and reliability. Prism-based LiDAR offers unique advantages in improving detection accuracy and range but features a relatively complex mechanical structure. As technology advances, pure solid-state LiDAR, characterized by the absence of mechanical moving parts, achieves scanning through optical phased arrays (OPA) or flash methods. With a simpler structure, smaller size, and improved durability, it is gradually becoming the mainstream development direction for future automotive and consumer-grade products.
In autonomous driving systems, LiDAR, cameras, millimeter-wave radars, and ultrasonic radars typically constitute a multi-sensor fusion perception system. Cameras excel in identifying object colors, textures, and detailed information but are significantly affected by environmental light changes, relying on deep learning algorithms for image processing. Millimeter-wave radars exhibit strong penetration and anti-interference capabilities but often fall short in resolution and ranging accuracy for high-precision environmental modeling. In contrast, LiDAR, with its high ranging accuracy, high angular resolution, and low latency, can stably provide detailed 3D environmental data in complex scenarios, crucial for autonomous driving systems to construct accurate road scenes and object boundaries. This direct acquisition of precise distance and angle information makes LiDAR irreplaceable in enhancing the safety and response speed of autonomous driving systems.


Why LiDAR is Indispensable for Urban NOA
Urban NOA relies on LiDAR due to its unique technical advantages in complex urban traffic scenarios. Unlike structured driving environments like highways, urban roads are filled with dynamic and unpredictable factors such as pedestrians, irregular obstacles, traffic signs, static infrastructure, and other vehicles. Through high-density 3D point cloud data, LiDAR can capture the position, shape, and dynamic information of surrounding objects in real-time in complex urban environments, constructing a high-precision 3D environmental model. Compared to other perception devices like cameras and millimeter-wave radars, LiDAR offers higher precision and stronger environmental adaptability, providing urban NOA with more reliable environmental perception data and significantly reducing the risk of misjudgment or omission in the perception system.
LiDAR has irreplaceable advantages in identifying irregular obstacles. In urban traffic environments, there are numerous types of irregular obstacles with varying shapes and reflection characteristics. Cameras typically rely on deep learning algorithms to identify object categories but exhibit lower reliability under conditions like shadows, strong light, or nighttime. Millimeter-wave radars are better suited for detecting metal or regularly shaped objects but perform poorly in reflecting small or non-metal objects and have low resolution. In contrast, LiDAR directly outputs high-precision 3D point cloud information without complex image processing, enabling accurate and rapid identification of the position and shape of irregular obstacles, providing precise environmental data support for path planning and dynamic decision-making.
LiDAR's high-precision ranging capability for static and dynamic objects is crucial. Urban NOA requires vehicles to navigate frequently changing vehicle and pedestrian behaviors in dynamic traffic environments, such as sudden lane changes, pedestrians running red lights, or cyclists emerging from blind spots. In these scenarios, LiDAR can measure the distance between objects and vehicles with centimeter-level accuracy and quickly determine object trajectories and speeds through continuous point cloud frame data. This capability enables vehicles to quickly replan paths in a short time and avoid traffic accidents. This high-speed and precise environmental perception is difficult to achieve solely with cameras and millimeter-wave radars, especially in emergency situations, where LiDAR's real-time and high-confidence data becomes vital for ensuring vehicle safety.
LiDAR's applicability across various urban scenarios further consolidates its irreplaceable role in urban NOA systems. Unlike highways, urban roads feature numerous static infrastructures and dynamic traffic elements like traffic lights, road signs, curbs, trees, and buildings, creating a highly complex and random environment. LiDAR's high-angular-resolution 3D modeling capabilities allow it to clearly distinguish different types of objects in dense traffic or complex infrastructure environments. This recognition and segmentation ability not only aids in precise navigation but also effectively enhances vehicles' ability to navigate complex scenarios.
LiDAR's advantages in low-latency response and high safety redundancy are also crucial reasons for its indispensability in urban NOA. In urban roads, incidents like pedestrians suddenly emerging from blind spots, cyclists abruptly changing lanes to avoid obstacles, or vehicles suddenly braking in congestion occur more frequently than on highways. In these scenarios, vehicles must make decisions within milliseconds, and low-latency response is directly related to traffic safety. LiDAR, independent of ambient lighting, outputs stable and reliable point cloud data under various weather and lighting conditions, measuring environmental changes in real-time. This rapid response and high-precision perception capability provide sufficient time windows for autonomous driving decision systems to perform emergency braking, evasion, or path replanning, significantly enhancing overall system safety.
Under multi-sensor fusion technology, LiDAR also plays a key role in providing perception redundancy. A significant challenge in achieving high-level autonomous driving (L3 and above) is ensuring system safety when a single sensor fails, relying on other sensors to provide sufficient information redundancy. Due to the different perception principles of LiDAR, cameras, and millimeter-wave radars, their sensing characteristics in different scenarios are highly complementary. In situations of limited vision (like heavy fog, nighttime, or strong light) or severe radar signal interference, LiDAR can still provide complete and high-precision 3D environmental data, serving as an important support for system redundancy design. Through data fusion with cameras and millimeter-wave radars, LiDAR provides multiple layers of protection for urban NOA systems, significantly enhancing overall system reliability.
LiDAR's role in map reconstruction and high-precision positioning cannot be overlooked. Urban NOA not only relies on standard map navigation but also requires integrating high-precision maps to achieve centimeter-level positioning, crucial for vehicles' precise navigation in complex urban environments. By scanning the surrounding environment in real-time, LiDAR captures landmark information (like curbs, iconic buildings, or road signs) and matches them with static landmarks in high-precision maps to achieve precise vehicle positioning. This environment-based positioning method not only provides a crucial backup when GPS signals are weak or unavailable but also dynamically updates map data to adapt to infrastructure changes in urban environments. This capability greatly enhances the robustness and reliability of urban NOA systems in complex dynamic environments.

Trends in LiDAR Development
While seemingly simple, LiDAR encompasses multiple components, including laser emission modules, laser reception modules, timing modules, and control modules, with the cost of the optoelectronic system accounting for the majority of the overall cost. Lasers, as the core component of LiDAR, include solid-state, gas, dye, semiconductor, and fiber lasers. In automotive applications, commonly used laser emission wavelengths are 905nm and 1550nm. 905nm lasers are widely used due to their lower cost and smaller size, while 1550nm lasers exhibit advantages in specific scenarios with higher safety and longer detection distances.
Laser reception modules convert reflected light signals into electrical signals through highly sensitive photodetectors, providing data support for subsequent distance calculations. Additionally, timing modules and control modules impose high requirements on the response speed, data acquisition, and processing capabilities of the entire LiDAR system.
In recent years, advancements in chip-based and integrated technologies have transformed LiDAR design from numerous discrete components to a few highly integrated chips, significantly reducing system costs. According to statistics, compared to 2016, the cost of a single LiDAR transceiver line in 2023 was only one-twentieth of the original cost. This cost reduction undoubtedly lays a solid foundation for the popularization of LiDAR in more niche markets.

In the rapid development of LiDAR technology, chip-based design is a core approach to reducing costs and enhancing performance. By integrating traditionally complex and discrete laser control circuits, signal acquisition and conversion circuits, and waveform processing circuits into a few specialized chips, the number of components in the system is drastically reduced, simplifying and stabilizing the system structure.
With continuous advancements in chip manufacturing processes, LiDAR has achieved a cost reduction effect similar to "Moore's Law," with product performance significantly improving over time while prices decrease accordingly. Increased integration also allows for a substantial reduction in LiDAR size, simplifying production processes and optical calibration, thereby further enhancing production efficiency. Solid-state development represents the mainstream direction for future LiDAR technology. By eliminating all mechanical moving parts, pure solid-state LiDAR, with its simple structure, small size, high durability, and declining costs, is gradually replacing traditional mechanical and hybrid solid-state products, becoming an important choice for automotive and consumer-grade products. Although current pure solid-state technology still faces some challenges, with continuous optimization of technologies like VCSEL, Flash, and OPA, its application prospects are undoubtedly promising.
In the future, LiDAR technology will continue to evolve, focusing on cost reduction, efficiency enhancement, technological integration, and product diversification. The primary catalysts behind this progression are ongoing cost minimization efforts and the transition to mass production. By leveraging chip-based and integrated design methodologies, LiDAR production costs will be further lowered, while production efficiency and product uniformity will witness substantial improvements. Additionally, the diversification of products and the expanding array of application scenarios will propel LiDAR beyond the realm of autonomous driving, making it increasingly pivotal in sectors such as robotics, smart transportation, industrial inspections, and security surveillance.
-- END --
-
![]()
The Surprisingly Significant Impact Difference Between Quiet and Noisy Cars!
-
![]()
Breaking Through Storage Cycle Barriers: How AI Large Models and Coding Technology Synergize to Drive Transformation in the Security Industry
-
Facilitating the Slimming of Camera Modules! O-film Obtains Utility Model Patent for Periscope-Type Reflective Component
-
![]()
Hikvision Raytine’s Millimeter-Wave Body Imaging Security Inspection Device Achieves ECAC SSc Category A Standard Level 2.1 Certification for European Civil Aviation
-
![]()
Global Market Share for Security Windows Hits 26%! This Optical 'Little Giant' Makes Its Debut on NEEQ
-
![]()
The Evolutionary Path of Agent Engineering: From Prompt to Harness by Zhang Yutao, Co-founder of Moonshot AI
-
![]()
Profits and stock prices are both declining, so why are executives from these auto companies increasing their purchases?
-
![]()
Burning Tens of Billions of Dollars, Yet No Unified Definition for World Models