The Ascendance of End-to-End Technology in Autonomous Driving
 06/19 2025
06/19 2025
 1101
1101
With the relentless march of intelligence in the automotive industry, intelligent driving technology has advanced from L2-level assisted driving to L3 and beyond, heralding a new era of high-level autonomous driving. Notably, the advent of end-to-end intelligent driving technology marks a pivotal shift in the landscape. Unlike traditional modular designs, end-to-end technology integrates perception, decision-making, and control into a cohesive architecture grounded in artificial neural networks, vastly simplifying system complexity while enhancing efficiency and generalization capabilities. This technological leap not only transforms the development paradigm of intelligent driving but also profoundly impacts the industry as a whole.
In recent years, the progressive adoption of end-to-end technology has been fueled by an array of drivers. On the technological front, advancements in automotive electronics and electrical architectures, the proliferation of high-compute chips in vehicles, and the evolution of deep learning algorithms have laid a solid foundation. Policy deregulation and the burgeoning consumer demand for advanced intelligent driving features have further accelerated its commercialization.
Crucially, the successful implementation of end-to-end technology has reshaped the competitive landscape of high-level intelligent driving. In the traditional paradigm, algorithm design reigned supreme. However, in the era of end-to-end technology, data and computing power have emerged as key determinants of success. Enterprises must now focus on amassing vast amounts of data and allocating efficient training compute resources, which not only intensifies the demand for R&D resources but also spurs automakers to adopt a full-stack, self-research model for data closed loops and rapid iterations.
End-to-End Technology: A New Catalyst for Intelligent Driving
End-to-end technology is redefining the development trajectory of intelligent driving systems. Its core lies in the data-driven integration of the entire process—from perception to control—through artificial neural networks. This approach eschews traditional modular design, integrating perception, planning, and control into a unified framework, thereby achieving heightened efficiency, robust generalization, and superior global optimization. In contrast, traditional modular systems isolate these functions into distinct modules, with information flowing between them via predefined interfaces, often leading to delays, redundancy, and error accumulation, ultimately constraining overall performance. End-to-end technology directly maps inputs (e.g., sensor data) to outputs (e.g., steering angle or accelerator/brake signals), bypassing complex intermediate modules, simplifying the system architecture, and enhancing performance.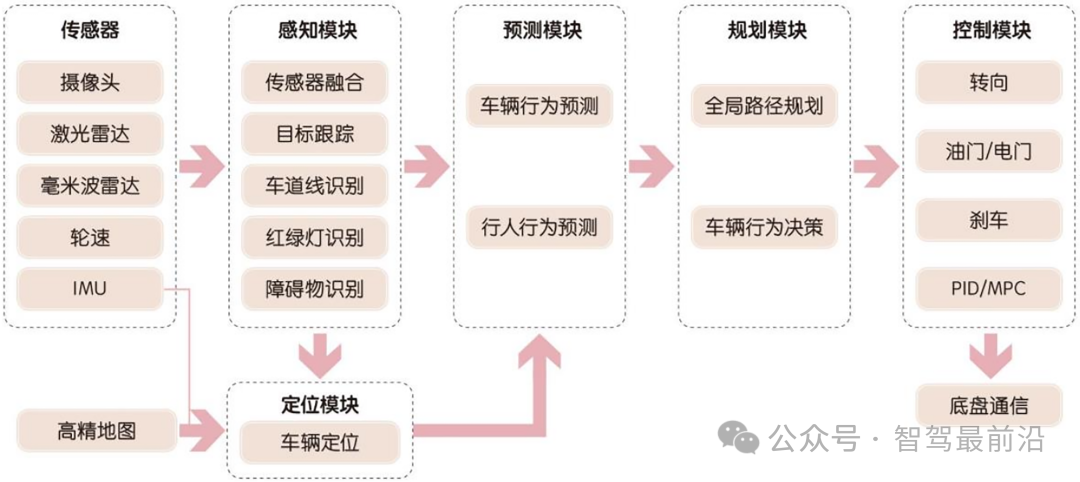
Composition of Traditional Intelligent Driving Systems
The end-to-end architecture leverages advanced deep learning methods to process input data through extensive neural networks. Tesla's FSD V12 system, for instance, employs BEV (Bird's Eye View) and Transformer models to unify 2D image data from multiple cameras into a 3D spatial coordinate system, enhancing global perception. The Transformer's multi-layer feature interaction mechanism efficiently extracts key data insights, markedly improving perception accuracy and dynamic scene understanding. This enhanced global optimization capability minimizes delays and information loss inherent in traditional modular systems. Furthermore, by utilizing extensive driving data during training, end-to-end technology directly optimizes overall driving performance through deep learning models, significantly bolstering the system's generalization to unknown scenarios, enabling it to navigate complex and variable road environments, including unusual traffic signs, irregular roads, or adverse weather conditions.
Moreover, end-to-end technology's computational efficiency facilitates rapid adoption. Unlike traditional modular systems that process data sequentially, the end-to-end architecture directly maps inputs to outputs through an integrated neural network, significantly boosting processing speed. This structure allows for more efficient utilization of computing resources, reducing the compute power required for system operation, thus paving the way for large-scale deployment of high-level intelligent driving features.
Another hallmark of end-to-end technology is its reliance on a data-driven development model. In contrast to traditional rule-based systems, end-to-end technology solely relies on the training of extensive real-world driving data. This approach not only elevates system performance but also enables rapid adaptation to diverse scenarios and demands through continuous iterative optimization. Li Auto's 4D One Model architecture, for example, significantly improves performance in complex urban settings by utilizing user driving data from across the nation for model training. Similarly, Tesla's vast data collection network has amassed over 2 billion miles of assisted driving data globally, enabling its FSD system to efficiently adapt and optimize for various driving scenarios. This data-driven model, coupled with the end-to-end architecture's global optimization capabilities, propels intelligent driving systems towards a qualitative leap in performance and reliability.
End-to-end technology, with its holistic optimization, data-driven approach, and computational efficiency, stands as the cornerstone of intelligent driving technology's evolution. Its disruptive innovation addresses the limitations of modular systems while laying the groundwork for advanced intelligent driving capabilities. As deep learning algorithms and hardware compute power continue to advance, end-to-end technology is poised to unleash its full potential, ushering in new possibilities for the automotive industry.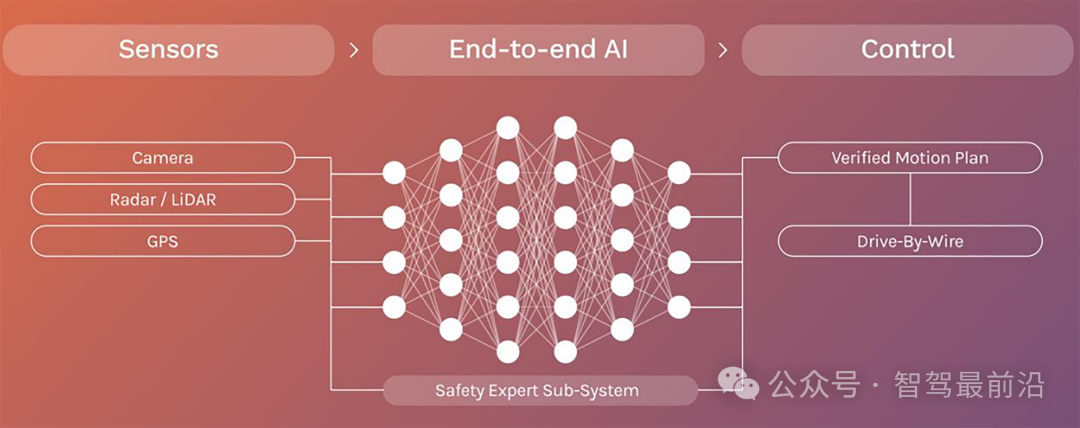
Intelligent Driving System Based on End-to-End Models
End-to-End Technology Implementation: A Breakthrough in Urban NOA
The rapid evolution of end-to-end technology has positioned urban NOA (Navigate on Autopilot) as a landmark application for high-level intelligent driving. Urban NOA is a sophisticated driving assistance feature capable of handling lane keeping, unprotected left and U-turns, traffic signal recognition, and automatic lane changing and overtaking in urban environments. These functions demand precise perception of complex road environments coupled with swift and efficient planning and decision-making. Traditional modular systems struggle to meet the real-time and stability requirements of highly complex urban scenarios due to information loss and modular limitations. End-to-end technology, through holistic optimization, provides robust technical support for urban NOA breakthroughs.
Technically, urban NOA leverages the global perception and decision-making prowess of end-to-end neural networks. The system generates real-time BEV (Bird's Eye View) feature maps through multi-modal data fusion (incorporating cameras, millimeter-wave radars, LiDARs, and ultrasonic sensors), presenting a comprehensive view of the surrounding environment in a unified coordinate system. Building on BEV, the system integrates Transformer models to fuse 2D image features with 3D spatial information, enabling efficient processing of dynamic and static target interactions. This global perception capability underpins obstacle detection, dynamic target tracking, and static target prediction in complex urban settings. Xpeng Motors, through its XNGP system, employs an end-to-end BEV+Transformer architecture to accurately recognize road boundaries, irregular lane lines, traffic signals, and pedestrians, facilitating the nationwide rollout of urban NOA.
Beyond enhanced perception, the optimization of planning and decision-making modules by end-to-end technology is crucial. In traditional systems, perception, planning, and control operate independently, with the planning module making path decisions post-perception. This design inevitably introduces delays. Conversely, end-to-end technology generates control commands directly from sensor inputs through an integrated neural network, eliminating redundant information transmission and delays, thereby significantly boosting system response speed and decision-making efficiency. Li Auto's end-to-end model, incorporated into its 4D One Model architecture, completes the perception-to-control process within milliseconds, enabling the vehicle to swiftly adjust its driving strategy in complex urban traffic.
End-to-end technology's application in urban NOA also manifests in improved scenario generalization. Urban road environments are highly complex due to regional, weather, and traffic rule variations, making it challenging for traditional rule-driven systems to cover all "corner cases." Through massive data-based deep learning, end-to-end technology significantly enhances adaptability to unseen scenarios. Tesla's FSD system, for instance, utilizes Occupancy network technology for 3D spatial modeling to predict irregular road obstacles, maintaining efficient and safe driving performance in emergency situations. Additionally, manufacturers like Li Auto and Xpeng have integrated advanced visual language models (VLM) into their end-to-end technology, achieving more human-like decision-making and further enhancing user experience and driving safety.
From a cost perspective, end-to-end technology's optimization of hardware resource utilization facilitates urban NOA implementation. Traditional modular systems relied on multiple high-performance processors for perception, decision-making, and control, whereas end-to-end technology significantly reduces compute power requirements through efficient overall model operation. For instance, Tesla, Li Auto, and Xpeng have all reduced hardware costs for urban NOA by optimizing their end-to-end model architectures, promoting the widespread adoption of high-level intelligent driving across various price segments. This synergistic hardware-software optimization not only decreases development and production costs but also accelerates the penetration of urban NOA.
The implementation of end-to-end technology provides robust technical support for urban NOA realization. Through global perception, rapid decision-making, and strong adaptability to complex scenarios, end-to-end technology is propelling high-level intelligent driving into a new era of full-scale popularization. As deep learning algorithms continue to evolve and compute power resources further expand, the technical potential of urban NOA will be further unleashed, steering the automotive industry towards smarter and more efficient development.
Future Trends of End-to-End Technology
The swift popularization of end-to-end technology is propelling intelligent driving technology into its next evolutionary phase. In terms of technical trends, future end-to-end intelligent driving systems will undergo further advancements, emphasizing more efficient model optimization, enhanced generalization capabilities, and smarter computing power allocation. As deep learning technology continues to advance, the architecture of end-to-end models will become more streamlined and efficient. While the existing BEV+Transformer architecture has significantly improved the system's perception and decision-making abilities, its high computational complexity hinders its widespread adoption in mid- and low-end vehicle models. By integrating advanced neural network optimization techniques, such as dynamic weight sharing and lightweight network design, end-to-end models can maintain or even improve their understanding of complex scenarios while reducing computational demands. This evolution will gradually transform end-to-end intelligent driving from a premium feature to a widely accessible technology, catering to a broader market segment.
Enhancing generalization capabilities will be a pivotal breakthrough for future end-to-end technology. In complex and dynamic urban driving scenarios, long-tail problems pose a significant challenge for intelligent driving systems. Current end-to-end models excel in known scenarios but encounter uncertainty in rare or unseen situations. With the introduction of generative artificial intelligence (Generative AI), end-to-end models will significantly broaden the diversity and scope of their training data through virtual scenario generation and data augmentation. By leveraging virtual driving data created by generative adversarial networks (GANs) or diffusion models, the system can simulate various extreme weather conditions, abnormal traffic behaviors, and unique road environments, thereby enhancing the model's adaptability and safety redundancy in real-world scenarios. This virtual data-based training approach is expected to emerge as a hotspot in end-to-end technology, rapidly advancing intelligent driving from "usable" to "user-friendly".
Intelligent allocation of computing power will also be a core aspect of future end-to-end intelligent driving development. The successful deployment of end-to-end models hinges not only on robust training computing power but also on efficient inference computing power. Leading enterprises like Tesla and Li Auto have invested heavily in cloud training computing power, establishing large-scale supercomputing centers. However, with the increasing complexity of end-to-end models, achieving efficient inference with limited onboard computing resources will become crucial. In the future, through the integration of distributed computing power architecture and edge computing, end-to-end systems will dynamically allocate tasks between the cloud and the vehicle. The vehicle will handle high-real-time tasks (e.g., obstacle detection and emergency braking), while the cloud will process complex decisions requiring substantial computing power (e.g., path optimization and long-term planning). This model will significantly enhance the real-time response of intelligent driving systems while reducing vehicle costs, paving the way for broader end-to-end technology adoption.
In terms of industrial trends, the popularization of end-to-end technology is reshaping the competitive landscape of the automotive industry. Data and computing power have become core competitive factors in high-level intelligent driving, and the widespread adoption of end-to-end technology is accelerating this trend. In the future, automakers with comprehensive data closed-loop systems and robust computing power support will dominate the market. Companies such as Tesla, Huawei, and Li Auto have accumulated deep expertise in data collection, algorithm optimization, and hardware adaptation through full-stack in-house R&D models. Notably, Huawei's ADS 3.0 system and Li Auto's 4D One Model architecture achieve seamless integration from perception to control through end-to-end large model technology. This capability positions them at the technological forefront of the high-level intelligent driving market.
End-to-end technology also holds significant commercialization potential for the automotive industry. As technology matures and hardware costs decline, the adoption of high-level intelligent driving functions like urban NOA will surge, adding substantial value to automakers. Moreover, the efficient iteration capability of end-to-end systems presents immense potential in the aftermarket. Through OTA (Over-The-Air) updates, these systems can continuously enhance the intelligent driving experience for users. This "one-time hardware sale, continuous software value-add" business model not only boosts automakers' profitability but also opens new avenues for growth for investors.
Overall, end-to-end technology is propelling the intelligent driving industry into a new era of technological competition, characterized by its exceptional performance and broad adaptability. With continuous technological breakthroughs and the improvement of the industrial ecosystem, end-to-end technology will create immense technological value and business opportunities for the automotive industry, emerging as an indispensable driving force in the wave of intelligence. For investors, keeping a close eye on enterprises with strong data and computing power advantages, as well as significant accumulations in end-to-end technology, such as Tesla, Huawei, and Li Auto, will help capture the long-term dividends of industry development.
Conclusion
The ascendancy of end-to-end intelligent driving technology is redefining the technical framework and competitive dynamics of the entire automotive industry. As a pivotal node in the development of high-level intelligent driving systems, end-to-end technology offers novel solutions for the practical implementation of intelligent driving through its global optimization capabilities, efficient computing power utilization, and robust generalization abilities. The strengths of this technology are not only evident in the overall optimization driven by deep learning but also in its disruption of traditional modular design constraints, significantly simplifying system complexity and improving adaptability to complex driving scenarios.
The progression of end-to-end technology is not merely a technological race but a systematic revolution in industry transformation. With ongoing breakthroughs in artificial intelligence, deep learning, and computing power technologies, end-to-end technology will gradually become the standard architecture for fully autonomous driving systems, laying a solid technological foundation for the automotive industry's journey towards comprehensive intelligence. In the near future, end-to-end technology will transcend urban NOA or L3-level intelligent driving functions, becoming a cornerstone for L4 and even L5 fully autonomous driving, heralding a future transportation ecosystem characterized by enhanced efficiency and safety. -- END --
-
![]()
The Surprisingly Significant Impact Difference Between Quiet and Noisy Cars!
-
![]()
Breaking Through Storage Cycle Barriers: How AI Large Models and Coding Technology Synergize to Drive Transformation in the Security Industry
-
Facilitating the Slimming of Camera Modules! O-film Obtains Utility Model Patent for Periscope-Type Reflective Component
-
![]()
Hikvision Raytine’s Millimeter-Wave Body Imaging Security Inspection Device Achieves ECAC SSc Category A Standard Level 2.1 Certification for European Civil Aviation
-
![]()
Global Market Share for Security Windows Hits 26%! This Optical 'Little Giant' Makes Its Debut on NEEQ
-
![]()
The Evolutionary Path of Agent Engineering: From Prompt to Harness by Zhang Yutao, Co-founder of Moonshot AI
-
![]()
Profits and stock prices are both declining, so why are executives from these auto companies increasing their purchases?
-
![]()
Burning Tens of Billions of Dollars, Yet No Unified Definition for World Models