The Intelligent Evolution Logic of Different Robot Chip Architectures, from Household to Humanoid
 10/11 2025
10/11 2025
 542
542
Produced by Zhineng Zhixin
Today's AI robots, as terminal carriers of artificial intelligence, derive their core capabilities from chip system support. Different types of robots exhibit significant differences in computing power, energy efficiency, real-time control, and system integration.
From household cleaning devices to commercial service robots, and further to industrial automation and humanoid bionic platforms, the choice of chip architecture reflects a balancing process between functional positioning, cost structure, and intelligence depth. We provide a brief overview of different solutions:
Part 1
Chip Solutions: Layered Intelligence from Household to Industrial
Within the robotics industry, differences in chips extend beyond computing power metrics; they also reflect system design priorities. Household and commercial robots aim to achieve sufficient intelligence within limited power consumption and cost constraints, whereas industrial and humanoid robots emphasize intelligent collaboration under real-time control and high reliability.
● Household/consumer robots prioritize cost-effectiveness and long battery life, with chip solutions primarily based on ARM architecture SoCs that emphasize integration and low power consumption.
Typical robotic vacuum cleaners often adopt solutions from domestic manufacturers like Allwinner Technology and Rockchip. These SoCs, operating at 1.2–1.5 GHz, can support SLAM mapping and path planning. Paired with 512 MB–1 GB of memory, they run lightweight navigation and obstacle avoidance algorithms while controlling costs.
For mid-to-high-end models with AI visual recognition, such as Roborock's flagship products, independent visual AI units are added to detect complex obstacles like pets and cables. Some manufacturers incorporate Qualcomm's IoT-version Snapdragon processors in higher-end models, utilizing 8-core APQ8053 or similar solutions for smoother AI obstacle avoidance.
Overall, household robot chips are evolving toward a "low-power AI SoC + distributed MCU" model, where the main controller handles strategic computing while low-power MCUs manage motor and sensor layer control, balancing energy efficiency and response speed.
● Commercial service robots require higher-level intelligent interaction and multimodal perception capabilities.
Scenarios like food delivery, inspection, and guided tours demand robots with integrated visual, voice, and environmental perception. The computing platform must support multithreaded AI tasks.
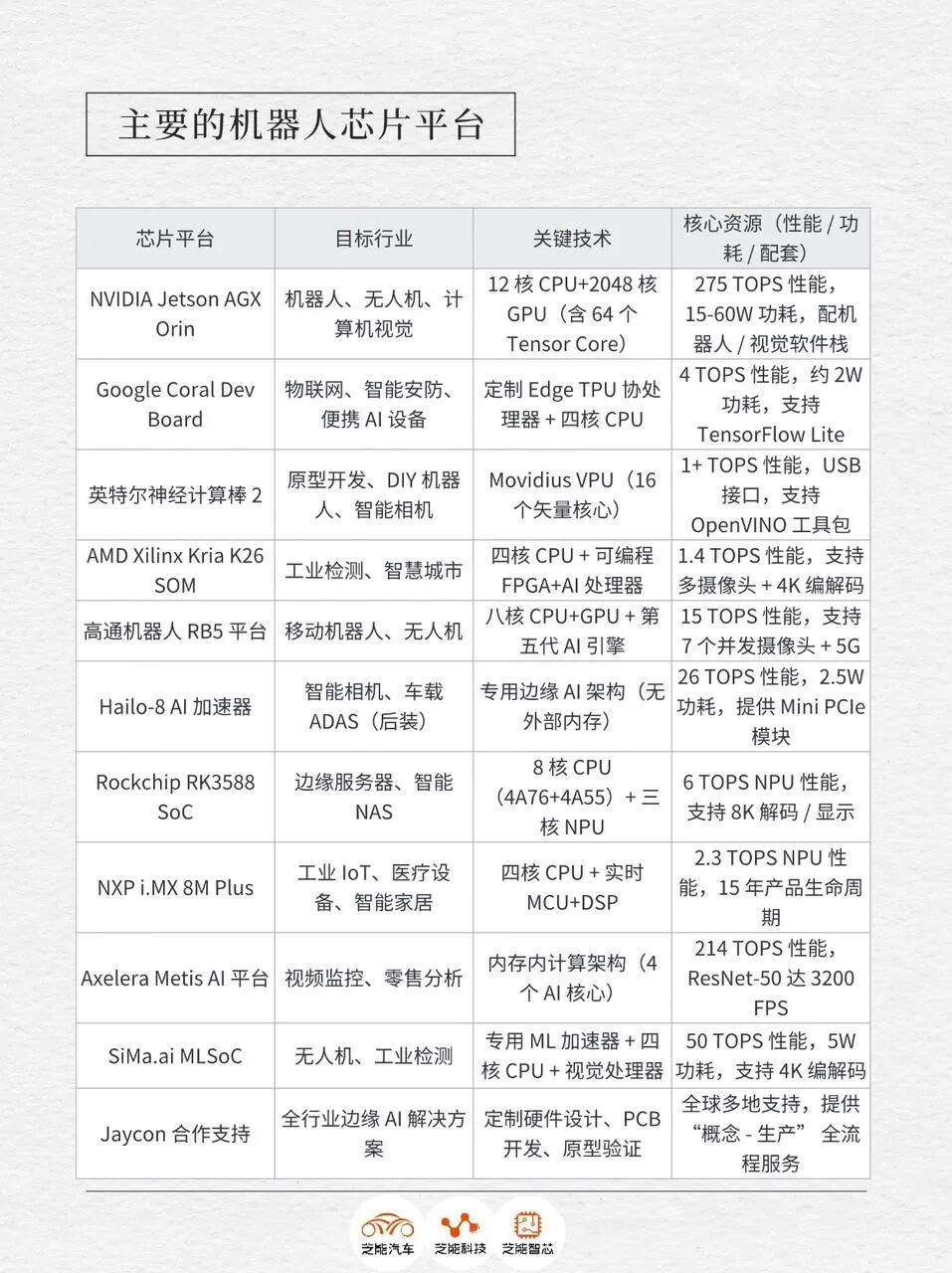
Solutions like Qualcomm's QRB5165 (RB5 platform) provide approximately 15 TOPS of AI computing power, featuring built-in Adreno GPUs and dedicated vision accelerators to process multiple camera inputs simultaneously. Robots equipped with this platform can perform image recognition and voice interaction at just a few watts of power consumption.
Domestic alternatives, such as Rockchip's RK35xx and HiSilicon's Hi3519 series, achieve mid-to-high-performance visual algorithm processing through NPU acceleration and local AI inference. They typically come with 4–8 GB of LPDDR4 memory and over 16 GB of storage to support Linux or Android systems and ROS framework operation.
To meet commercial deployment reliability requirements, these robots adopt modular designs for coprocessing and communication:
◎ STM32 or TI MCUs handle chassis drive control, while independent communication modules (4G/5G/Wi-Fi) ensure cloud collaboration;
◎ Some products incorporate Horizon Robotics chips at the edge to enhance facial recognition and voice inference efficiency. The layered architecture of "AI platform + motion control unit + communication security chip" has become a mainstream direction in the service robot industry.
● Industrial robots operate within entirely different computing systems.
Multi-joint robotic arms and mobile AGVs used in manufacturing emphasize "determinism and reliability." Their control systems rely on PLCs or industrial PCs with x86 or industrial-grade ARM processors, running real-time operating systems (VxWorks, QNX, etc.) to ensure sub-millisecond feedback.
Servo control and path planning tasks are typically accelerated by DSPs or FPGAs for high-frequency closed-loop control.
Systems like the Nabote controller adopt a dual-layer structure: an upper-layer IPC handles motion planning and AI tasks, while a lower-layer RTOS executes servo control in real time, communicating via buses like EtherCAT.
With the proliferation of AI visual inspection and autonomous navigation in industrial settings, GPUs and AI SoCs are penetrating industrial control architectures.
NVIDIA's Jetson Orin and IGX Orin platforms provide 50–275 TOPS of computing power for industrial AI, supporting complex visual inspection and autonomous material handling scenarios. Mobile robots like warehouse AGVs and driverless forklifts often combine NVIDIA's Orin NX or Intel Core CPUs with RealSense cameras for laser + visual SLAM.
Industrial robots are adopting a "centralized main control + intelligent joint" architecture—the main control platform handles AI inference and path planning, while each joint is equipped with a small MCU-based drive unit for high-speed servo control. This distributed architecture enhances robustness and safety redundancy, providing flexible expansion space for future collaborative robots.
Part 2
Evolution of Computing Power and Architecture: From Multi-Chip Collaboration to Human-Like Intelligence
Bionic and humanoid robots pursue "the unification of intelligence and perception." The main control chip must possess large-scale AI inference capabilities while processing data from dozens of sensors and actuators in real time. Balancing computing power and architecture becomes critical.
● Bionic quadruped robots
Represented by robotic dogs, they embody typical forms of mid-to-high computing power edge AI. Xiaomi's CyberDog uses NVIDIA's Jetson Xavier NX as its core AI platform, delivering 21 TOPS of computing power at 10–15 W for visual recognition, balance control, and dynamic obstacle avoidance. Its system runs on Ubuntu and ROS frameworks, utilizing GPU parallel computing to process multisensor data.
To ensure real-time control, Xiaomi also employs Allwinner's MR813 chip as a motion coprocessor, specifically executing attitude calculation and model predictive control algorithms to manage motor movements across 12 joints. The Allwinner R329 audio SoC handles voice interaction.
The master-slave collaborative design forms a closed loop between AI decision-making and physical motion, offering both flexibility and rapid response. Similar architectures appear in products from Unitree Technology, Boston Dynamics, and other manufacturers.
Quadruped robots typically adopt distributed control: each joint module contains an independent MCU or DSP for motor drive and force feedback, while the main AI handles motion planning and environmental understanding. The "central brain + local cerebellum" model dominates bionic systems, requiring millisecond-level cycle times for attitude adjustment—any delay could lead to instability.
● Humanoid robots
The chip system further evolves into "multi-layer heterogeneous integration," requiring dynamic balance in space, natural movement execution, and human-machine interaction via visual and language systems.
AI platforms like NVIDIA's Jetson Orin and the new-generation Jetson Thor represent this evolution. The Orin series offers 200 TOPS of computing power, supporting multi-camera input and Transformer-based model inference. The Thor platform elevates AI performance to 2070 TFLOPS (FP4), featuring 128 GB of high-bandwidth memory and a 14-core Neoverse CPU, capable of running generative AI models at the edge.
Humanoid robots must achieve local perception and decision-making without cloud dependency. Their architectures generally incorporate dozens of coprocessing units: each joint is managed by an independent controller (MCU, FPGA, or small SoC) connected to motors, encoders, and torque sensors for sub-millisecond control tasks.
Some companies are beginning to integrate AI chips at the joint level, using AI inference to optimize control parameters in real time for "adaptive motion." Local intelligence reduces central processing pressure and enables the system to maintain basic motion functions even with partial damage.
The communication system is also evolving. Initially reliant on CAN bus transmission, robots are gradually shifting to high-bandwidth solutions like TSN Gigabit Ethernet, improving data synchronization precision among distributed modules to the microsecond level. This ensures smooth and safe coordination of multijoint movements.
The chip evolution from household to humanoid robots demonstrates three major trends:
◎ Computing power decentralization and coprocessing enhancement. AI computing, once concentrated in the main controller, is gradually dispersing to edge nodes and sensor ends, reducing system latency and improving energy efficiency.
◎ Heterogeneous computing architectures have become mainstream. CPUs, GPUs, NPUs, and MCUs form a collaborative computing system, dividing tasks based on their characteristics. Of course, the distinction between the "brain," "cerebellum," and execution systems is becoming clearer.
◎ Software-hardware integrated ecosystems create barriers. Qualcomm and NVIDIA provide algorithm SDKs and development frameworks, while domestic manufacturers like Rockchip, Allwinner, and Horizon Robotics are enhancing competitiveness through software ecosystems.
Summary
Among intelligent hardware, motion-oriented robots impose the highest demands on chips. From low-power SoCs in consumer products to real-time systems in industrial control and AI chips in humanoid platforms, we will continue tracking developments across each platform. Chips are not just hardware for main controllers; they also serve as carriers for algorithms and ecosystems, requiring observation from multiple perspectives.
-
![]()
Every AITO Sold Contributes 136,000 Yuan to Huawei: Seres Faces Its Compaq Moment
-
![]()
Huang Renxun's Gambling
-
![]()
Is Seres Truly Being 'Bled Dry' by Huawei?
-
![]()
Robot Brain: A Lucrative Business or a Challenging Pursuit?
-
It's Official! Shanghai's July AI Extravaganza: A Gateway to Future Industry Trends and Global Consensus
-
![]()
After the Demise of the Big Factory Bot, I Leveraged AI to Craft an Interactive 'Haaland'
-
Anticipated Losses Reach Nearly 2.3 Billion Yuan! How Long Can Seres Sustain Its 'Contract Manufacturing' Predicament?
-
Wu Jianjun Steps In: Konka’s Fight for Efficiency and Revival