Tesla Optimus: Not the Best Choice for Full-Sized Humanoid Robots
 06/18 2026
06/18 2026
 365
365
Author|Mao Xinru
In today's embodied AI landscape, the brain, cerebellum, hardware, and data are widely acknowledged as the four pillars underpinning the sector.
This year, the spotlight has undeniably been on data and the brain.
With rapid model iteration, topics such as establishing a data closed loop and creating a data flywheel have taken center stage.
In contrast, hardware—the foundational support—has received far less attention. Many believe hardware is already ready, simply awaiting a sufficiently advanced brain.
Certainly, the brain is crucial. But does that mean hardware is insignificant?
The surge in new full-system robot releases this year has provided a strong counterpoint to the notion of prioritizing software over hardware.
Despite Unitree's G1 becoming a standout product last year, major manufacturers have continued to unveil new full-sized robots this year.
From the Zhiyuan Yuanzheng A3 at the beginning of the year, followed by Chaowei Power's KAI, Xinghaitu's Kengo, and Zhuji Power's LUNA, a series of new bipedal humanoid robots have made their debut.
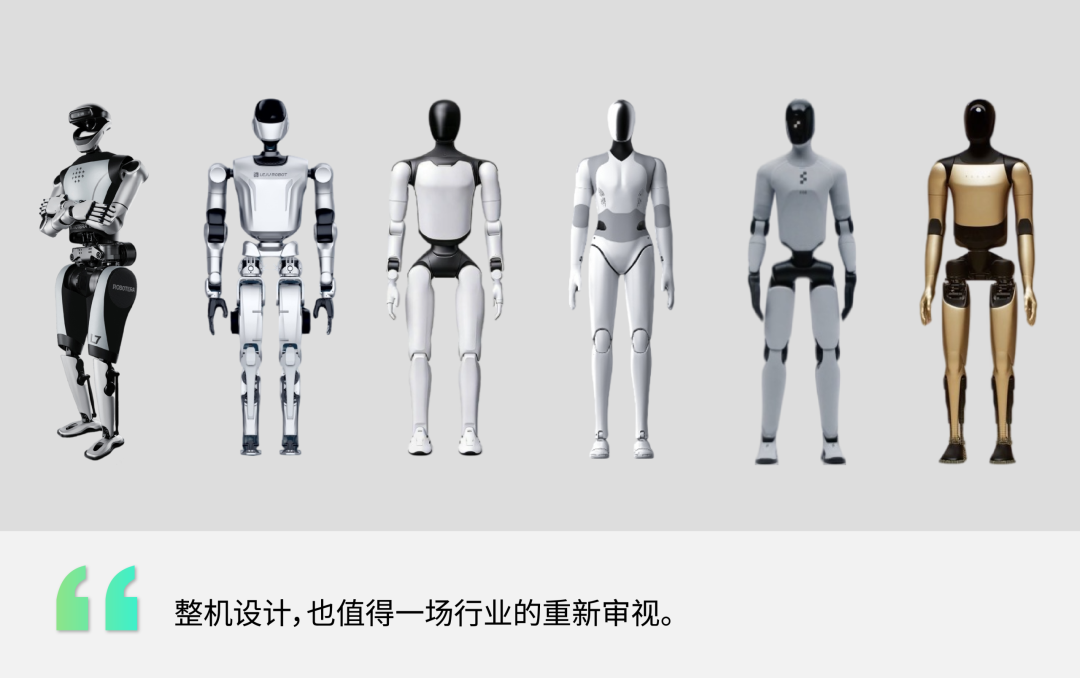
These players are signaling to the industry that ontology design requires reevaluation. Hardware is not just a container for models; it is one of the key factors determining data quality and iteration potential.
Without a mature hardware platform, even the most advanced brain algorithms and data models cannot be effectively implemented.
Examining the new products released this year, a clear morphological divide emerges.
Except for Xinghaitu's Kengo, which stands at 1.4 meters and falls into the mid-sized category, most players—including Zhiyuan, Chaowei Power, and Zhuji Power—have opted for full-sized designs (over 1.6 meters).
When we consider the entire industry, building a full-sized humanoid robot is also the common choice of most mainstream players.
This consensus is the result of long-term engineering iteration, scenario trial-and-error, and technological trade-offs: for robots to operate in a world designed for humans, they must physically align with human scale.

What Design Logic Should Full-Sized Humanoid Robots Follow?
What design logic should a full-sized humanoid robot adhere to?
This seemingly straightforward question actually involves multi-layered systems engineering considerations.
From an environmental adaptation perspective, the world robots enter is designed for humans.
Door handles, countertop heights, shelf spacing, stair slopes, and tool sizes—most daily and industrial spaces are not rebuilt for machines but are assumed to accommodate human activity.
In other words, humanoid robots should not reshape the world for machines but should adapt as closely as possible to human-scale dimensions.
Therefore, the first imperative of full-sized design is ensuring the robot's operational space fully overlaps with human activity space.
From a human-robot interaction standpoint, the more a robot can present its posture, gestures, expressions, and movements in human-understandable ways, the easier it is to gain advantages in communication, trust, and collaboration.

For full-sized humanoid robots, the key is not just resembling humans but enabling people to interact with them without relearning how to do so in terms of eye-level height, movement rhythm, body proportions, and interaction posture.
Where it stands, how its head is positioned, how its arms cover the workspace, and what movements its waist and hips can perform—these are not merely aesthetic issues but engineering problems that directly determine whether it can enter homes, factories, and public spaces.
Beyond that, size design also affects the robot's stability, energy consumption, and controllability.
For bipedal robots, metrics like the zero-moment point, center-of-mass height, and support polygon all vary with height and limb proportions.
Making the robot taller increases leg drive requirements, joint torque, and overall energy consumption; making it too short sacrifices obstacle-clearing ability, operational radius, and natural proportion with humans.
After all, bipedal locomotion is not just about standing still but involves dynamic stability and control feasibility.
Thus, the real test of the full-sized approach is not a single parameter but whether the entire system can find a balance among stability, energy consumption, range of motion, and task coverage.
From a data utilization perspective, full-sized design also helps reduce the simulation-to-reality gap caused by size discrepancies.
Today's humanoid robots do not learn to walk, reach, or turn from scratch but heavily rely on human motion capture, skeletal models, and kinematic redirection.
If the robot's proportions, joint layout, and body structure differ too much from humans, motion data must undergo extensive remapping, reducing both training and deployment efficiency.
Therefore, the true value of full-sized humanoid robots lies not just in resembling humans but in more easily converting existing human data, motion libraries, and interaction experience into executable robot capabilities.
This is why, in today's industry, full-sized design is gradually becoming not just a size choice but a system design philosophy oriented toward the real world.

Full-Sized Humanoid Robots: Three Paths to Value Realization
With full-sized design becoming an industry consensus, true differentiation lies in the chosen path.
Different companies have vastly different answers to what these robots are ultimately for.
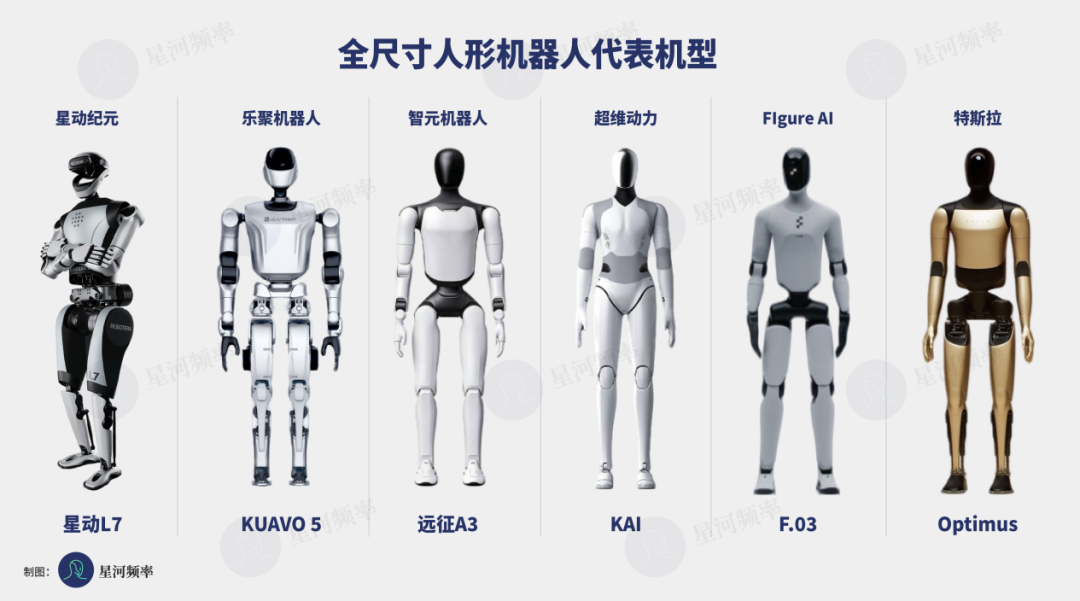
The first path is the most ambitious and closest to the ultimate vision of humanoid robots: targeting the home. Representative robots include Figure AI's F.03 and Chaowei Power's KAI.
From its inception, Figure AI has positioned home service as its ultimate scenario, with this year's demo videos focusing on high-frequency household needs like kitchens, living rooms, and bedrooms.
In early 2024, Figure updated its robot brain, Helix 02, adding system0 to the existing fast-slow brain hierarchical architecture to enhance the robot's whole-body control capabilities.
Chaowei Power's KAI similarly positions itself around home companionship and service. Like Figure AI, Chaowei Power is also a typical full-stack company.
Their previously launched SMASH system was the world's first outdoor autonomous perception-enabled humanoid robot table tennis system, highlighting their whole-body motion control capabilities. At the launch event, KAI also unveiled its world model, though few details have been released.
Both are full-stack companies targeting the home scenario, but KAI and Figure also have significant differences.
KAI prioritizes developing the robot body first, then training models and collecting data based on that body. With 115 degrees of freedom (DoF) across its body, 80% tactile skin coverage, and a 36-DoF dexterous hand, KAI's hardware design aims to minimize the sense of distance in human-robot interaction.
Notably, 115 DoF represents the highest freedom count among globally deployed humanoid robots, bringing KAI closer to true human proportions.
The advantage is that training algorithms on a 1:1 human-scale robot makes it more human-like and easier to integrate into the real world.

The second path is more pragmatic and quicker to yield results: prioritizing industrial deployment. Star Era's L7 and Ubtech's Kuavo 5 are typical representatives, focusing on collecting scenario-specific know-how and getting robots to work first.
Star Era L7 stands 171 cm tall, with dual-arm payloads of 20 kg and self-developed joint modules delivering peak torque of 400 Nm.
L7 can both entertain with dances and perform tasks on production lines, having already completed package sorting tasks in logistics scenarios for SF Express and China Post.
Ubtech's KUAVO5 has a maximum payload of 20 kg and can operate stably in harsh conditions, including sub-zero temperatures (-20°C) and dense crowds.
Both robots can also adopt a semi-humanoid form for specific applications.
These robots prioritize payload capacity, repeat positioning accuracy, fatigue resistance, and environmental adaptability, as factory and warehouse needs are clear and direct, with more straightforward revenue paths.
The third path pursues ecological storytelling. Tesla Optimus and Zhiyuan Yuanzheng A3 each represent a mindset of leveraging ecosystems to drive overall progress.
Tesla positions Optimus as the final piece of its existing energy, automotive, and AI businesses.
With the massive cash flow and manufacturing capabilities provided by its automotive business, Optimus is first deployed internally in Tesla's factories for self-production and self-use, enabling rapid iteration through application-driven R&D before gradually expanding to the broader household market.
Its advantage lies not just in integrated hardware-software R&D efficiency but in using large-scale industrial deployment to validate technologies and reduce per-unit costs, ultimately achieving what Elon Musk has said would be cheaper than cars.
Zhiyuan Yuanzheng A3, meanwhile, takes a different but equally clever approach: targeting research and education markets as its entry point, aiming to become the new standard research platform for universities and labs, much like Unitree's G1.
Yuanzheng A3's body proportions are designed according to real human proportions, equipped with a fully free-degree flexible waist that 1:1 replicates human anatomy, supporting large-amplitude twisting and extreme dynamic control.
By providing open algorithm and hardware platforms to research institutions, Zhiyuan can collect vast amounts of scenario data and algorithmic feedback, feeding back into subsequent product iterations and achieving a growth loop of platform-building ecosystems and ecosystem-driven iteration.

These three paths each have their own focus, with no clear superiority.
The industrial path capitalizes on current practical needs, the household path bets on future value, and the ecological path plays the long game.
But regardless of the chosen path, if the ultimate goal is to truly enter human living spaces, especially homes, all players must answer a more fundamental question: Is resembling humans enough?

Beyond Size: Depth of Anthropomorphism as the True Moat
The answer to the above question is clearly no.
When mainstream products across the industry converge on full-sized benchmarks, hardware appearance (form factor) homogenization becomes inevitable. The core differentiator in future market stratification will lie in the depth of anthropomorphism.
Specific challenges will arise in five dimensions: human proportion replication, whole-body DoF configuration, full-body tactile perception, aesthetic and cultural design, and data closed-loop iteration.
To create continuously usable and effective humanoid robots, human proportions must first be accurately replicated.
While some models now stand over 1.6 meters tall, some merely meet this parameter while designing limbs and torsos based on industrial mechanical structures, resulting in proportions that are not fully human-like.
This approach directly prevents normal application of motion data, causing actions to deform during real-world operation despite perfect simulation training. Such robots can only perform fixed standard actions and struggle in complex scenarios like homes.
In contrast, products like Star Era L7 and Chaowei Power's KAI, both at 1.73 meters, strictly reference Asian adult skeletal data for limb proportions, with head-to-body ratios and shoulder-waist dimensions close to humans, ensuring smooth transfer and use of motion data from the hardware level.
The number and layout of joint degrees of freedom determine whether a robot can perform nuanced small movements.
Currently, most mass-produced humanoid robots in the industry have 41–60 DoF across their bodies.
Chaowei Power's KAI takes a different approach, incorporating 115 DoF within its 1.73-meter frame, with redundant design in often-simplified areas like shoulders, neck, lumbar spine, and wrists, fully replicating human range of motion.
From academic consensus, increasing DoF to 115 means the mathematical computations required for control algorithms grow exponentially.
Ensuring real-time, lag-free coordination among 115 motors poses a significant challenge for central processors and AI algorithms.
Chaowei Power is currently the global leader in advancing embodied brain-cerebellum development on this ultra-high-DoF hardware platform, which is also its core advantage for targeting household scenarios.

If we want robots to safely enter households, tactile perception is the safety bottom line.
This is also a method to alleviate the uncanny valley effect. With sensitive tactile senses, robots can precisely control their force to avoid hurting people or breaking objects.
Currently, most robots are only equipped with sensors at their fingertips, with no sensing capabilities in other parts of their bodies.
Chaowei Power’s KAI robot is equipped with a full-body distributed electronic skin, boasting 18,000 independent tactile sensors and achieving a sensing accuracy of 0.1N. This design closely mimics the tactile sensitivity of the human hand.
When handling delicate items like eggs or glass cups, the robot can adjust its grip in real-time. Additionally, it immediately retracts its force upon detecting human contact, effectively eliminating safety concerns in close-range home interactions.
The exterior design also plays a crucial role in the human-robot interaction experience. Exposed mechanical metal components can create a sense of distance, whereas a soft fabric exterior can reduce the perceived coldness of machinery and help bridge the psychological gap between humans and robots.
From the earlier 1X’s NEO to the current F.03 and KAI models, all have fully embraced fabric coverings. It is evident that creating an anthropomorphic appearance for home robots has become an industry trend.
Highly anthropomorphic hardware offers an often underestimated advantage: it fosters a positive feedback loop with data collection.
A highly bionic body, paired with motion capture technology, can directly record authentic human behavior data in home settings. This data can then be used to train AI systems without the need for additional conversion processes.
The closer the hardware resembles the human body, the higher the efficiency of data utilization, resulting in more natural robotic movements. Furthermore, new data generated after deployment can, in turn, be used to refine and optimize algorithms.
This process creates a closed-loop system: highly anthropomorphic hardware leads to efficient data migration, which results in more natural behavior, and subsequently generates more realistic interaction data.
Examining the industry as a whole, two distinct development paths have gradually emerged.
Path A focuses on industrial efficiency, treating anthropomorphism as an optional feature. It prioritizes maximizing the robot's strength, speed, and repetitive accuracy to meet rigid demands in structured environments such as factories and warehouses.
Path B, in contrast, emphasizes anthropomorphism. It begins by constructing a hardware foundation that closely resembles humans and then gradually develops artificial intelligence capabilities and adaptability to various scenarios.
The home environment represents a typical unstructured interaction scenario, characterized by unpredictable conditions, non-fixed tasks, and a diverse range of interaction objects. Only when the hardware closely resembles that of a human can higher-level intelligence be fully leveraged.
From this perspective, although Path B may not generate revenue and scale effects as rapidly as the industrial path in the short term, it addresses the most critical needs of full-sized humanoid robots: a sufficiently human-like body and a highly sensitive perception network.
The consensus on full-sized humanoid robots in the industry extends far beyond mere size and technical parameters; it represents a collective decision driven by engineering rationality and the demands of specific scenarios.
And when all leading teams start from the same baseline, the real competition has just begun.
From size to form, from degrees of freedom to tactile sensitivity, from perception to interaction, companies that choose to delve deeper into anthropomorphic design will gain an irreplaceable competitive advantage when addressing the ultimate challenge of home service robots.
Ultimately, as another creation of humanity for itself, the final form of humanoid robots should be evaluated based on how closely they resemble humans.
-
![]()
Chinese New Energy Vehicle Design: Stepping Out of the Shadows
-
![]()
Li Auto Awards Executives 35 Million Shares Based on Performance Metrics
-
![]()
Rushing Towards AI 2.0: How Confident is Unisound?
-
经过今年上半年各路AI豪强对市场的反复教育,有一个判断,可能决定未来一两年的走向:
-
![]()
Global Tech Sector Sees Collective Panic: Is the AI Hype Finally Deflating?
-
![]()
Three Consecutive Rises in Heavy Truck Sales: Both New and Old Players are Betting on the Same Thing!
-
![]()
Why Can’t Vivo Bridge the High-End Perception Gap Despite Support from Authoritative Media?
-
![]()
Regulatory Measures and Industry Norms: The Transformation of GEO's Trajectory in the Second Half