Tesla FSD V14.3: Is It Time to Let AI Take the Wheel?
 05/20 2026
05/20 2026
 487
487
In late April 2026, Tesla commenced the rollout of FSD V14.3 to users across North America. This iteration marks a significant technical leap, eliminating over 300,000 lines of manually crafted C++ code for vehicle control and substituting it with direct driving instructions generated by a neural network. The update also includes a revamped compiler, a substantial increase in model size, and the introduction of spatiotemporal memory capabilities. Today, we delve into the intricacies of Tesla's FSD V14.3.
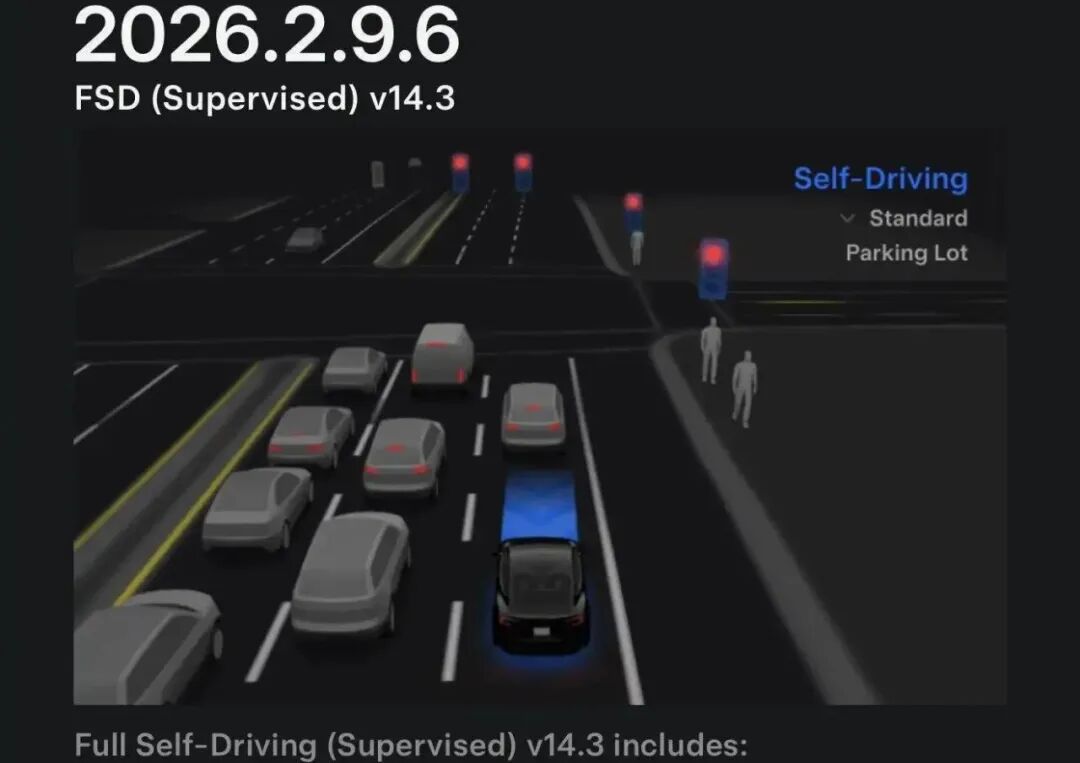
Image Source: Internet

How Did Tesla Achieve the Final Piece of the End-to-End Puzzle?
Beginning with V12, Tesla entrusted perception and path planning to the neural network, meaning the system no longer depended on manually written rules to interpret its surroundings and determine routes. However, the final step—vehicle control (translating planning results into specific steering angles, throttle inputs, and brake forces)—still relied on traditional control logic. This logic encompassed over 300,000 lines of C++ code, meticulously written and maintained by engineers.
Controlling vehicles with code has always posed a challenge: no matter how detailed the rules, there are always scenarios that confound the system. For instance, should you accelerate to pass before a yellow light turns red or stop in advance? When faced with multiple empty parking spaces, which one should you choose? These situations, which human drivers handle intuitively, become rigid trade-offs in a rule-based system. Code can only account for scenarios engineers anticipated in advance, leaving areas outside these rules as blind spots for the system's capabilities.
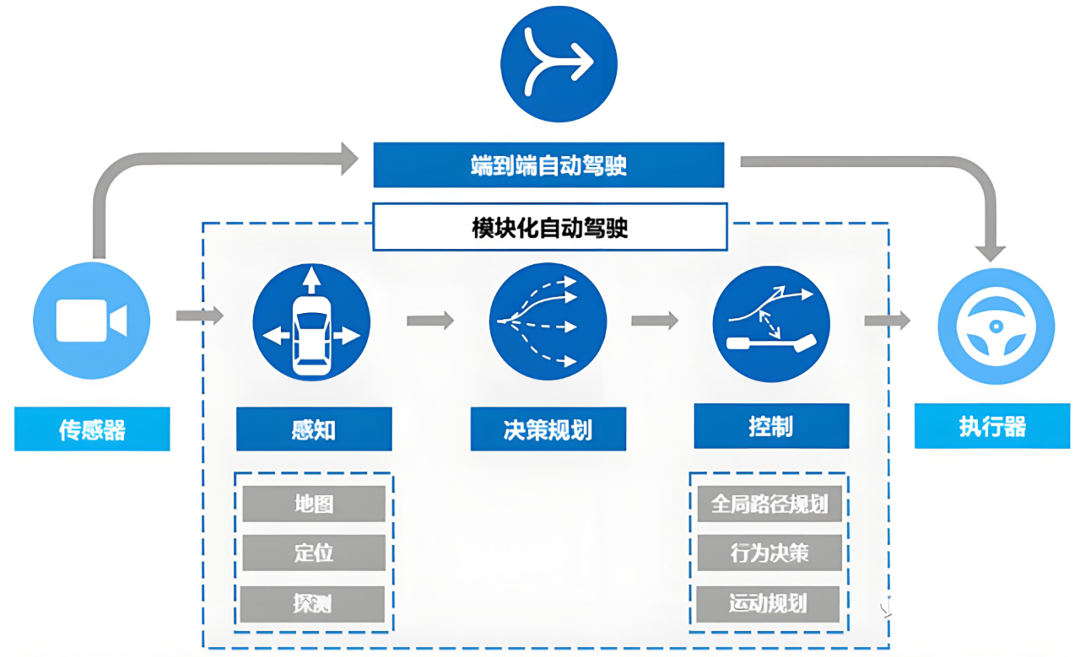
Image Source: Internet
The most significant change in V14.3 is that AI neural networks now directly handle the entire intelligent driving process. From receiving images from onboard cameras to generating final steering and pedal instructions, the system bypasses any manually written rules. This is what we often refer to as a full-domain, single-stage end-to-end architecture. Under this architecture, there is no need to separately define modules like perception, planning, and control—the entire process is executed by a single neural network.
What are the advantages of letting AI neural networks take over intelligent driving? For an autonomous driving system, it no longer needs to evaluate rule entries like stopping at a red light. Instead, it can learn appropriate actions from vast amounts of human driving data. The learning data includes responses to various complex scenarios, and the model's task is to internalize these as its own experience. This means the system's capability ceiling no longer depends on the number of engineers or the time spent writing rules but rather on the richness of the training data and whether the model itself can effectively digest this data.
To achieve this, Tesla increased the neural network's parameter count to roughly 10 times that of the previous version. A larger model can remember more diverse road condition patterns, such as irregular intersections, complex traffic lights, intricate construction zone layouts, and non-standardized traffic signs. These edge cases, previously impossible to fully learn due to capacity limitations, can now be absorbed by the model. This is why V14.3 demonstrates noticeably improved performance in some rare scenarios.

The Compiler Was Also Overhauled, Reducing Response Time by 20%
Beyond the model architecture itself, Tesla also revamped a less noticeable yet crucial component in V14.3: the compiler. The compiler's role is to translate the neural network's computational logic into instructions executable by the hardware. The computational graph of an autonomous driving model is extremely complex, and traditional compilers generate redundant computational steps during translation, leading to many unnecessary operations during actual execution.

Image Source: Internet
This time, Tesla rewrote the compiler and runtime environment from scratch based on the MLIR (Multi-Level Intermediate Representation) framework. MLIR's advantage lies in preserving structural information of the computational graph at a higher abstraction level, making it easier to identify which operations can be merged and which data can be reused, then generating more streamlined hardware instruction sequences. This design reduces the time delay from when the camera captures an image to when the vehicle executes acceleration or steering actions by 20% compared to before.
For a vehicle traveling at 120 kilometers per hour, this 20% reduction means a shorter braking intervention distance after perceiving danger. In high-speed scenarios, the difference between being slightly faster or slower can sometimes be critical.

The Model Can Now Remember Events from 3 to 5 Seconds Ago
In addition to the above, V14.3 introduces, for the first time, explicit spatiotemporal memory capabilities to the FSD model, lasting about 3 to 5 seconds. Previously, FSD's decision-making relied more on reacting to the current frame, and while earlier versions indirectly captured some temporal information through algorithms, there was no clear memory mechanism. As a result, the system occasionally behaved as if it had forgotten what happened a second ago—for example, reacting slowly when a vehicle just changed lanes in front, or applying unnecessary brakes while following another car.
A 3- to 5-second memory means the model can now remember the acceleration and deceleration dynamics of the vehicle ahead in the short term, the speed limit number on a road sign just passed, or the movement speed changes of pedestrians at an intersection. This information participates in subsequent trajectory planning and speed adjustments, making driving actions more coherent. Based on this, the vehicle no longer reacts frame by frame but has a continuous temporal perception.
This capability is crucial for large models. With increased parameter counts, the model itself has sufficient capacity to maintain a short-term memory state without needing additional external modules. Tesla's task was to train the model to associate what just happened with what should be done now.

Reinforcement Training Doubled, Focusing on Difficult Road Conditions
For large model training, Tesla also significantly increased its investment in long-tail scenarios. In V14.3's training dataset, Tesla consciously collected numerous rare and complex driving cases from its global fleet, such as intersections with compound traffic lights, yellow lights on curves, irregularly placed construction cones, sudden animal crossings, and obscured yield signs at street corners. These scenarios account for a small proportion of daily driving but directly determine user trust in the system when handled properly.
Tesla's approach was to actively increase the weight of these difficult samples during training rather than letting the model drown them out in vast amounts of conventional road conditions. This targeted reinforcement training allowed V14.3 to demonstrate performance in relatively rare scenarios close to that in conventional conditions. As a result, its acceleration and deceleration curves, response methods before stop signs, and parking choices in parking lots became more decisive, resembling those of a skilled driver.
The reinforcement training mentioned here does not replace the previous supervised learning training with human driving data but further fine-tunes the model using more difficult and rarer data on that basis. Basic training still relies on vast amounts of human driving videos to teach the model normal behavior, while reinforcement samples ensure the model remains calm and knows how to handle abnormal situations.

Visual Perception Has Also Improved—Can It Hear Emergency Vehicles Now?
Within the entire end-to-end framework, enhanced perception capabilities also contribute to the system's overall improvement. V14.3 upgrades the visual encoder, the part of the neural network responsible for extracting information from raw images. The new encoder can extract richer image information in low-light, nighttime, tunnel, and other poorly lit scenarios.
At the same time, its understanding of 3D spatial structures has significantly improved, allowing more accurate judgments of objects' positions and shapes in three-dimensional space. This means irregular obstacles, such as branches extending from sidewalks or bicycles leaning against the roadside, can now be identified more precisely.
Some introductions also mention a fascinating feature of V14.3: audio perception capabilities. Tesla has added emergency vehicle recognition to the system, allowing the vehicle not only to see flashing emergency vehicles but also to hear sirens and adjust accordingly. Upon recognizing an emergency vehicle, the system slows down, leaves passing space, and issues prompts when necessary. This signals a shift in perception from pure vision to multimodality.

Parking No Longer Involves Hesitation
For vehicle owners, the most noticeable improvement in V14.3 is its parking function. Some owners report that previous FSD versions did not perform particularly well in parking lots—despite several empty spaces ahead, the system did not know which one to choose, repeatedly switching candidate spaces and hesitating in its maneuvers. V14.3 has significantly changed this. The system now marks its intended parking spot with a P icon on the navigation map in advance and becomes much more decisive in selecting targets and parking maneuvers near the spot. This indicates that the planning module now has a deeper understanding of parking lot scenarios in the current version, no longer remaining in a vague state of knowing it needs to park but unsure where.
Besides parking, V14.3 also performs more smoothly at intersections. When facing compound traffic lights (where main and auxiliary lights coexist or straight and turning lights alternate green), V14.3's passage judgments are closer to those of humans. It does not hesitate between accelerating and braking before a yellow light or delay half a second before moving when the light turns green. For lane-keeping functions, stability in maintaining lane centering during curves has also significantly improved, with less intrusion into adjacent lanes and smoother control of turning speeds.

What Will V14.3 Do Next?
In its update notes for V14.3, Tesla also previewed several upcoming tasks. One highly anticipated feature, pothole avoidance, has been officially added to the roadmap. Based on the current technical approach, the system will first detect road surface irregularities through vision and then incorporate them into path planning considerations. A longer-term plan is to combine information from vehicle suspension sensors to further verify road conditions, making avoidance timing and magnitude more accurate.
Additionally, for models equipped with HW3 hardware, Tesla plans to roll out a lightweight version, FSD V14 Lite, by the end of June. This version distills and compresses the full V14.3 model, retaining core driving capabilities but making compromises in model scale and detail performance. It should be noted that because the full V14.3's computational load far exceeds the hardware capabilities designed for HW3, the lightweight version cannot be directly adapted by simply trimming the full version. It requires a separate round of architectural adjustments and specialized training for HW3 to run stably on this older hardware. This is highly beneficial for existing owners, but whether the compressed version can maintain V14.3's core experience remains to be seen after actual feedback.
It should be clarified that for a truly supervision-free FSD—where the vehicle can drive autonomously without requiring the driver's constant attention—Tesla has not provided a specific timeline in the V14.3 update. From a technical trend perspective, V14.3's architecture already possesses the underlying capabilities to support higher-level autonomous driving, but currently, V14.3 remains a Level 2 system, with the person behind the wheel still ultimately responsible.
-- END --
-
![]()
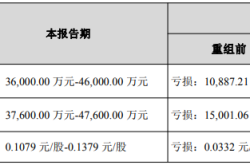
OFILM Reports Colossal 460 Million Yuan Loss: Founder Quietly Shifts Focus to Optical Modules!
-
![]()
Yutong Optics and Zeiss Forge Partnership to Develop Quality Measurement System and Launch "Optical Communication Joint Measurement Class"
-
![]()
AutoNavi Revises Splash Screen Ads with Precision Amid Controversy
-
![]()
Unlicensed Vehicle Disputes: AutoNavi Ensnared in the Aggregation Model
-
![]()
Agent: The 'Hard Requirement' for Entering Core Enterprise Systems for the First Time
-
![]()
Global Auto Market Outlook: Sales Decline in China, US, and Europe, Chinese Exports Approach 10 Million
-
![]()
AI Pioneer Breaks Free from the 'Doldrums'
-
![]()
Valuation Exceeds $26 Billion! Three Chinese "Gold Medalists" Shake Up the AI Industry